Preliminary Test Plan - BP02
NATO UNCLASSIFIED January 29th , 2002
SACLANT UNDERSEA RESEARCH CENTER
PRELIMINARY TRIAL PLAN No : A03
TITLE : BP02
PERIODS COVERED : May 6th - June 2nd , 2002
VESSELS INVOLVED : R/V Alliance
GEOGRAPHIC AREA : Elba, Framura
SCIENTIST IN CHARGE : Edoardo Bovio
ENGINEERING COORDINATOR : R. Stoner and P.A. Sletner
PROGRAM : 01A, 01B, 03G
OTHER COLLABORATING ORGANIZATIONS : MIT, FFI, Harvard, GESMA, HWU, I3S
POC: H. Schmidt (MIT)
P. E. Hagen (FFI)
A. Robinson (Harvard)
B. Zerr (GESMA)
D. Lane (HWU)
J. Rendas (I3S)
SUBMITTED BY: E. Bovio Date
PROJECT APPROVAL:
Head, REA Date
Head, MCM Date
Head, ETD Date
COORDINATION: Head SMO Date
Head ITO Date
REVIEWED: Programme Officer Date
Naval Advisor Date
TEST PLAN APPROVAL: Deputy Director Date
DISTRIBUTION:
D, DD, N, S, POI, POII, Dept. Heads, SMO, Engineering Coordinators,
Participating Personnel, Personnel Office Payroll Section
NATO advanced planning anticipates significant use of Autonomous Underwater Vehicles (AUVs) for REA operations in preparation for MCM, ASW and AW activities. The overall objective of programme 01B is to explore and demonstrate the operational benefits and limitations of AUV based sensors for military battlespace preparation applications. Battlespace preparation applications include efficient and clandestine route or reconnaissance surveys of seafloor and water column properties with near-real-time data return.
Similarly to GOATS2000, the BP02 sea trial will be a multi-national, multi-disciplinary experiment addressing the utilization of AUVs in coastal waters. SACLANTCEN will operate the OEX, MIT will provide two Odyssey III, WHOI will provide two Remus, GESMA will participate with R/V Thetis equipped with the interferometric Klein side scan sonar, Harvard will provide the oceanographic modeling, FFI will test the TRIN navigation algorithms, I3S and HWU will provide visualisation and unsupervised segmentation software.
The experiment has three broad objectives: Oceanography, REA and Navigation. In addition WHOI will demonstrate detection, classification, and identification of exercise mines with Remus. This work will be conducted in cooperation with P03G.
The Oceanographic component of the BP02 experiment is in support of P01A. The REA and Navigation components are in support of P01B, the MCM component is in support of P03G.
Ocean forecasting is essential for effective and efficient use of AUVs in littoral environment. The Assessment of Skill for Coastal Ocean Transients (ASCOT) JRP focuses on forecast system development. The first two weeks of the BP02 sea trial will be dedicated to ASCOT02. The objective is to carry out and quantitatively evaluate a multiscale real time forecasting experiment in support of long range AUV missions.
This experiment will demonstrate the capabilities of AUVs as REA platforms in shallow water. The information collected will include acoustic and video images, bathymetry and water mass properties like current, salinity, density and temperature. The AUVs will be launched from R/V Alliance, and survey the bays of Levanto, Bonassola and Framura to collect environmental information in preparation for the MCMFORSOUTH's Percentage Clearance (PC) trial scheduled in February 2003. All data will be stored in the SACLANTCEN GIS database and compared with the ground truth information already collected in the area.
In addition GESMA will independently survey the area with R/V Thetis equipped with the interferometric Klein and provide co-registered bathymetry and imaging of the sea floor. Of particular interest is the quantitative assessment of the digital terrain map obtained with the Klein and the comparison with that obtained with the EM-3000.
The Italian Navy will lay a field of exercise mines and conduct a PC trial in the Framura area prior to the BP02 experiment. The WHOI team will demonstrate the use of the Remus AUVs to detect, classify and identify the minefield. This work will be performed under guidance of P03G.
Precise navigation of AUVs is vital for battle space preparation. This can be achieved with GPS, but sometimes it is operationally preferable to avoid that the vehicle surfaces to get a position update. Terrain aided navigation is attractive because does not require the surfacing of the vehicle. A new method for terrain aided navigation called TRIN (Terrain Referenced Integrated Navigation), developed at the Norwegian Defence Research Establishment (FFI), was successfully tested during GOATS2000 simulating an AUV with Manning. The method requires data from any instrument that can measure the distance to the seafloor in one or more known directions, such as a Doppler Velocity Log (DVL). The experiment will be repeated during BP02 using the DVL data collected on board the OEX, Remus and Odyssey AUVs operating in the Framura area.
The terrain referenced navigation requires a priori knowledge of the bottom topography. This can be a disadvantage when vehicles have to operate in uncharted areas. The final goal of this study is to identify strategies that allow to build a map of an unknown area and navigate at the same time. This is called concurrent mapping and localization (CML). MIT will perform initial tests towards this goal with their Odysseys during the last week of the experiment.
The ASCOT02 component will take place from 8 to 17 May. There will be three periods devoted to sampling: 8-10 May - initialisation; 11-14 May - adaptive sampling; 15-17 May - verification.
A two-way nested HOPS model will be run at Harvard University to predict oceanographic parameters in local (such as around Elba) and far field (eastern Ligurian sea) regions. The Channel and Elba nested modeling domains for real-time nowcasting and forecasting are described in Figure 1 and in Table 1.
Figure 1: Channel (blue) and Elba(red) domains. Bathymetry is from DBDBV, coordinate grid is 6'x6', long range AUV mission is shown in magenta.
|
|
Channel domain |
Elba domain |
|
Zonal extent |
9o24' E - 11o06' E |
10o03' E - 10o48' E |
|
Meridional extent |
42o30' N - 43o18' N |
42o45' N - 43o12' N |
|
Resolution |
1 km |
333 m |
|
Grid points |
12282 |
27450 |
Table 1: Characteristics of Channel and Elba domains
Identical tracks will be used for the initialisation and verification surveys conducted by R/V Alliance that will work 24 hrs a day (Fig 2). Adaptive sampling patterns will be determined on short notice based on forecast results for both R/V Alliance and Remus. At the end of the adaptive sampling period, the HOPS model output will be used to optimize the long range AUV missions from the coast of Italy to Elba island. During one long range mission Remus will survey a bottom feature in the gulf of Baratti.
Oceanographic data will be collected by R/V Alliance with CTD, XBT, XCTD (as backup only in case of CTD problems), surface drifters and vessel mounted ADCP. A reference station will be deployed in Piombino channel prior to the arrival of Alliance and will comprise one SEPTR buoy, one bottom mounted ADCP, thermistor chain moorings, tidal gauges and meteo buoy. The deployment and retrieval will be performed by a suitable boat rented for this purpose.
During the adaptive sampling period, two Remus vehicles will provide data for model validation and assimilation. Two identical AUVs will be available, but only one will be operated at any time. The AUV will run missions up to 8 hrs at a speed of 3-4 kt during daylight. The vehicle will be escorted by R/V Alliance at a distance of 500-1000 m. Tracking will be achieved by TrackPoint II mounted on the well of the ship and acoustic communication will be maintained by the WHOI Utility Modem deployed overboard. The acoustic link will allow real-time data retrieval at a reduced rate and on-line programming of the vehicle mission.
Remus will execute CTD sampling in yo-yo mode and ADCP sampling in a depth range of 0-100 m. The ADCP sampling requires bottom tracking and allows velocity measurements 20 m below and above the vehicle. The format of the data will be Matlab compatible. The Remus CTD will be calibrated at SACLANTCEN before the departure of R/V Alliance.
Figure 2: CTD stations (red), mooring positions(blue) and ship's track of the initialisation and verification surveys. This pattern can be conducted within approximately 77 hours.
The REA, MCM and navigation experiments will take place in the bays of Levanto, Bonassola and Framura as shown in Fig. 3. R/V Alliance will provide logistic support to a fleet of AUVs that will perform a variety of missions in shallow water.
The scope of the REA component is to map with AUVs the area of the MCMFORSOUTH's PC trial scheduled next year. Data will be stored in a geographically referenced database for comparison with the historical data collected in the same area during previous experiments. The OEX will operate the dual frequency (150/600 kHz) Marine Sonic side scan sonar and the video camera, the Remus will operate the 900 kHz Marine Sonic and the DIDSON acoustic lens, the MIT REA Odyssey will operate a sub bottom profiler and a side scan sonar. All vehicles will be controlled from Alliance by acoustic communication.
AUVs will perform several missions a day, Remus will operate also at night. The sonar and video images will be downloaded at the end of each mission and processed. The navigation of the vehicles will be filtered and the images will be georeferenced using SeeTrack, SACLANTCEN GIS and TEI software. Unsupervised segmentation software developed by HWU, SACLANTCEN and I3S will divide the sea floor in areas of similar characteristic. Objects that have dimensions similar to a mine will be automatically extracted and marked on the GIS map. All data will contribute to the production of sea bed classification maps according to ATP 24 standard. The AUV surveys will be conducted by mainly performing linear parallel track with a spacing depending of the type of sensors. For additional views on detected objects, aspect dependent seabed features and interesting bathymetric features, the maneuverability of the AUV's will be fully exploited to define the tracks.
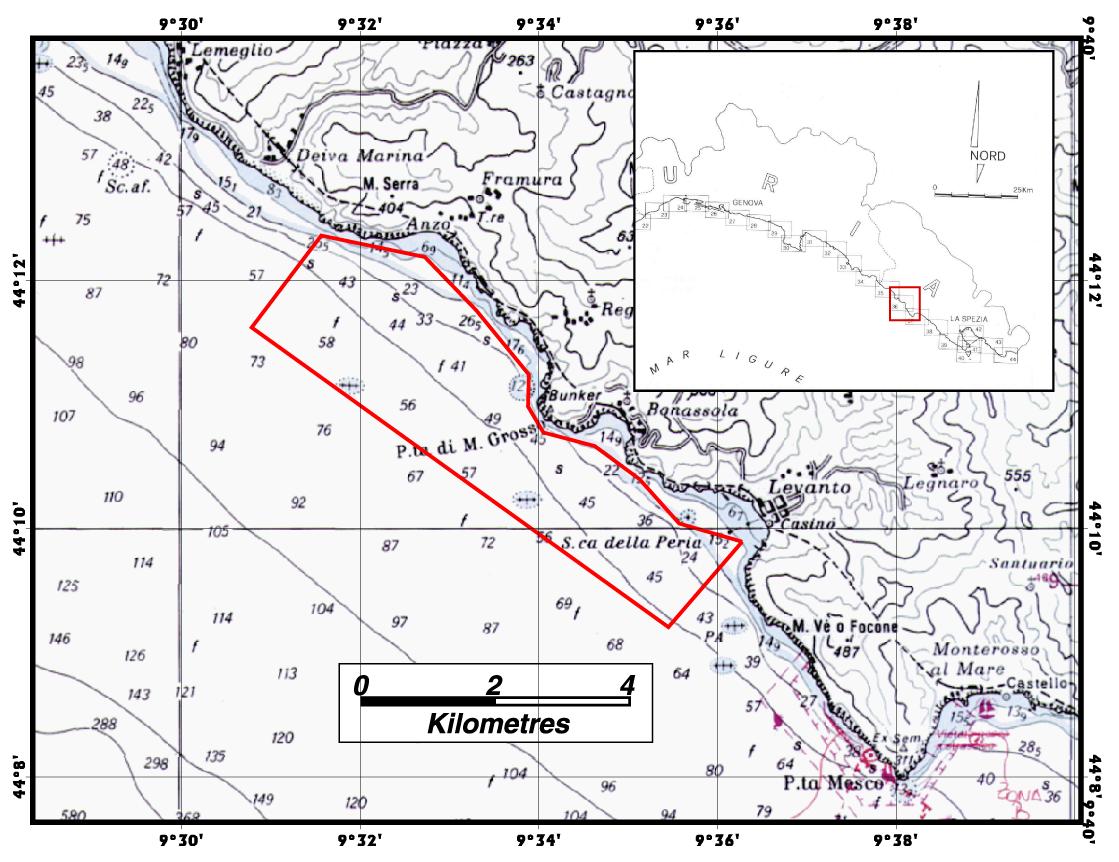
Figure 3: Location of REA, MCM and Navigation experiments
One Remus equipped with 900 kHz Marine Sonic will conduct a standard ladder search to detect the mines previously deployed by IN, provide near-real time telemetry of selected target images and redirect the second vehicle equipped with DIDSON acoustic lens to reacquire and identify the targets (Fig. 4). Both vehicles will be in the water at the same time and simultaneously use the new digital navigation beacons and the Utility Acoustic Modem developed at WHOI.
This experiment requires that the first vehicle is capable to automatically detect and classify mines and to send contact information to the second vehicle via the acoustic link. In case the CAD/CAC algorithms onboard will not be fully functional, the locations of the mines will be stored in the memory of the first vehicle prior to the mission.
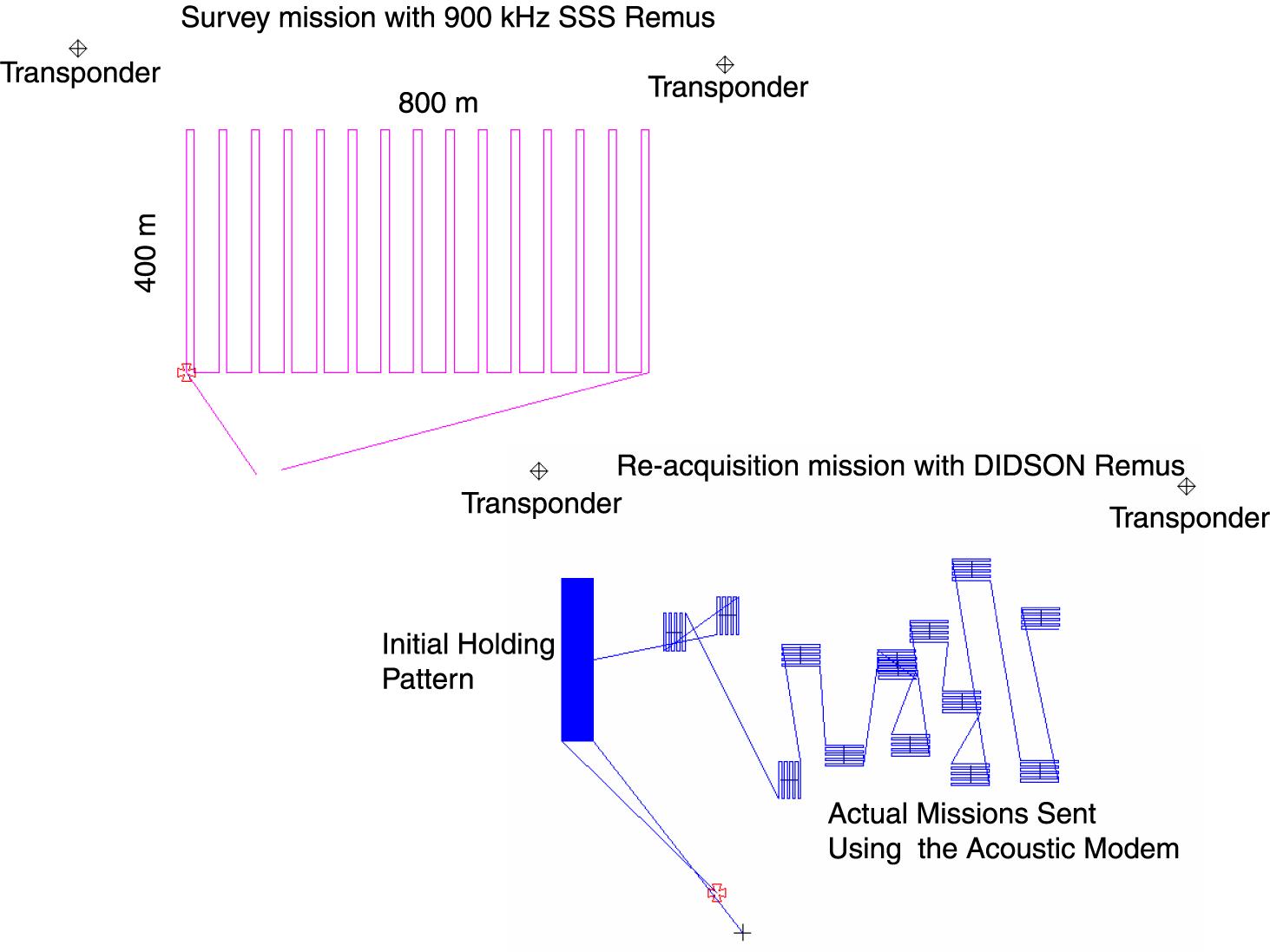
Figure 4: Detection, classification and identification with Remus
All vehicles operating in the Framura area will collect during their missions the distance to the seafloor in four known directions with their DVL. The data will be post processed by FFI with the TRIN algorithm to assess its performance in an area with gentle sloping bottom. The reference position information will be provided by a Long Base Line (LBL) network of transponders. The digital terrain map necessary to run the TRIN algorithm will be derived by the EM-3000 survey already performed in the Framura area.
The sequence of events is outlined in Fig. 5.
Figure 5: Sequence of events
The target deployment will be performed in advance of the trial by the Italian Navy. Two open contracts with a local diving company (one in Elba and one in Levanto) will be negotiated to cover emergencies (i.e. retrieval of sunken AUV). The local divers will also provide boat services to shuttle visitors to and from Alliance if necessary. SACLANTCEN scientific divers will document the experiment with videos as during GOATS2000.
R/V Alliance will depart from La Spezia when loading is completed on Tuesday 7th . She will return in the evening of Friday 17th and will stay in port throughout the week end. She will then proceed to the Framura area where she will anchor close to shore in support of AUV operations. On the week end of 26-27 May she will return to La Spezia to disembark the WHOI team and embark the MIT team. The cruise will end on Friday first of June.
Area clearance should be requested by the Military Coordinator for the Channel and Elba domains shown in Fig. 1 and for the Levanto, Bonassola and Framura area shown in Fig. 3.
Standard Alliance communication methods will be used for communications to SACLANTCEN. In addition, for the oceanographic modeling, it is necessary to have 128 kbps Internet connectivity from R/V Alliance.
The equipment required is listed below.
R/V Alliance
Equipment to perform ASCOT02 oceanographic sampling (CTD, XCTD, XBT, ADCP)
Equipment to deploy and operate the SACLANTCEN AUV and ROV
MIT equipment to deploy and operate 2 Odyssey III AUVs. Detailed list will be provided by MIT
WHOI equipment to deploy and operate 2 Remus AUVs. Detailed list will be provided by WHOI
TEI and GIS system with real time link to ship and AUV navigation
TrackPoint II system and acoustic modems will be mounted on Alliance for AUV communication and tracking during missions
Kinematic DGPS reference station for transponder positioning and AUV navigation
SeeTrack analysis SW
Rental Vessel
SEPTR
Bottom mounted ADCP, thermistor chains and mooring components
Meteo buoy
Scientific divers boat
Underwater digital camera
Oceanographic data collected by Remus will be fused with SEPTR data, with XBTs and CTDs collected by R/V Alliance and with the available meteorological information. The fused data set will be transmitted via Internet to the ASCOT modeling team. The oceanographic team onboard Alliance will coordinate the assimilation of oceanographic data collected by the various sources. The actual modeling code will run at Harvard.. The model output will be made available via Internet to R/V Alliance to perform adaptive sampling and optimize long range AUV missions according to the schedule outlined in Table 2.
|
Elba time |
Action |
Boston time |
|
20 |
CTD survey of Alliance starts |
14 |
|
22 |
Boundary conditions sent to HOPS |
16 |
|
8 |
CTD survey ends close to ELBA |
|
|
11 |
Data is validated and transferred |
5 |
|
|
Final editing at Harvard |
6 |
|
|
Start HOPS run |
8 |
|
19 |
Transmit forecast and new sampling plan to Alliance |
13 |
|
20 |
New CTD survey of Alliance starts |
|
Table 2: Timing of data exchange in support of ASCOT02
At night the oceanographic team will operate the Alliance ADCP and collect data with the standard CTD .
In addition to the personnel listed in Table 3, ETD is requested to deploy and retrieve the SEPTR and the other oceanographic equipment that will perform the ground truth measurements in Piombino channel. This operation will be performed with a suitable vessel rented for this task.
Table 3: Personnel requirements
There is a requirement to have 23 berths on Alliance throughout the experiment. In addition, when Alliance operates during the day in Framura, we expect to receive visitors. SMO is kindly requested to take appropriate measures to ensure that a complement of maximum 10 visitors could be transferred in the morning by external contractor's boats from shore to Alliance, follow the AUV experiments during the day and return to shore in the evening.
All operations will be conducted according to SACLANTCEN safety procedures as listed in ETD instructions. Diving will be coordinated by ETD and conducted by scientific diving team and external divers according to SACLANTCEN Staff Instruction 22-93. Standard operating procedures for deploying the Odyssey AUVs from Alliance will be made available by MIT. Standard operating procedures for deploying the OEX AUV from Alliance will be prepared by ETD. Standard operating procedures for deploying the Remus AUV from Alliance will be prepared by WHOI.
Travel
All personnel will leave and return to La Spezia on R/V Alliance. Transportation will be required to embark/disembark the oceanographic equipment on the rental vessel in Livorno.
Overtime
No overtime is planned. Technical Personnel will receive sea-going allowance in accordance with regulations in force.
E. Bovio