PLUSNet HU-MIT virtual Real-Time Experiment 1 (AREA-HOPS-ESSE)
- Scenario chosen:
The MIT-AUV is at the center of the PLUSNet region to carry
out its surveillance missions. Four bearings are possible
(0, 90, 180 and 270).
The optimization question asked is:
"which bearing should the MIT-AUV choose and which yoyo pattern
should it follow along that bearing, so as to best sample
the environment and optimize acoustic performance,
including reduction of acoustic uncertainties".
Acoustic predictions and optimization of the AUV path along the 2D bearings
were carried out by Ding Wang and Henrik Schmidt using RAM,
with sound-speed field inputs from HOPS predictions.
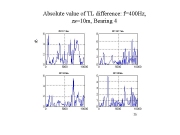
First, bearing/path 4 is chosen because this is where the
acoustic variability and uncertainties are predicted to
be the largest, based on one source and signals at four
receiver depths (see transmission loss curves)
The upwelling front is predicted to be crossing this path
along bearing 4 (start of -sustained- upwelling conditions)
and the environmental uncertainties are largest there too.
Note that sensitivity and uncertainty are different.
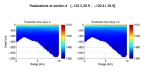
Second, a linear programming algorithm that Ding Wang (MIT)
is developing was used to select the yoyo pattern along this
path 4. The results of the optimization are shown by the path
in blue. Note that it captures the thermocline variations and
the corresponding acoustic effects.
|
|
|
|
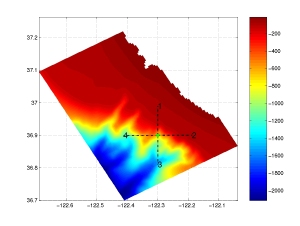
One source at central PLUSNet location,
4 bearings, 10km range, overlaid on centerography
|
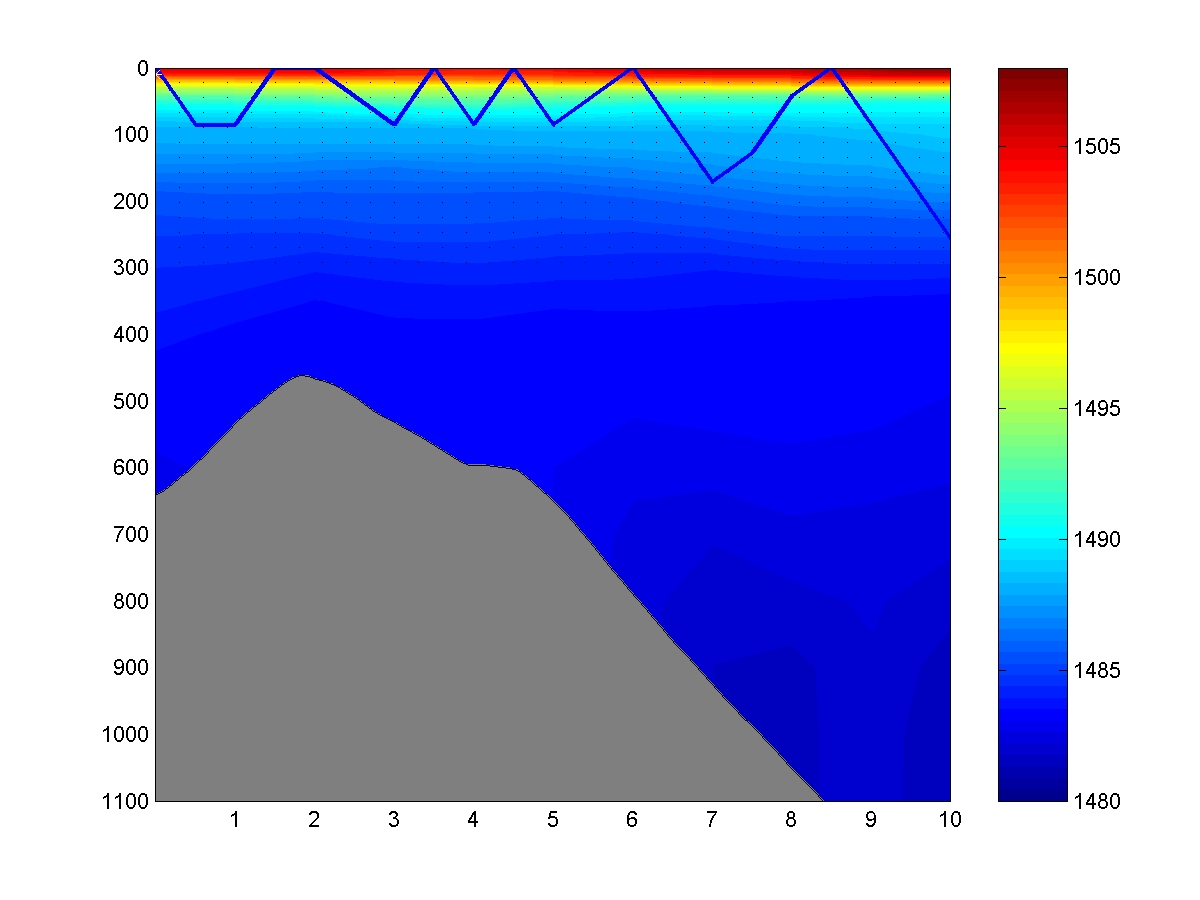
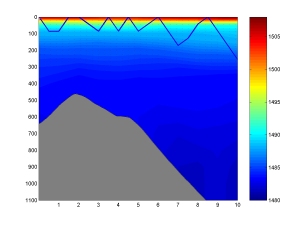
Optimized path for MIT-AUV, based on linear programming
and RAM-HOPS predictions.
|
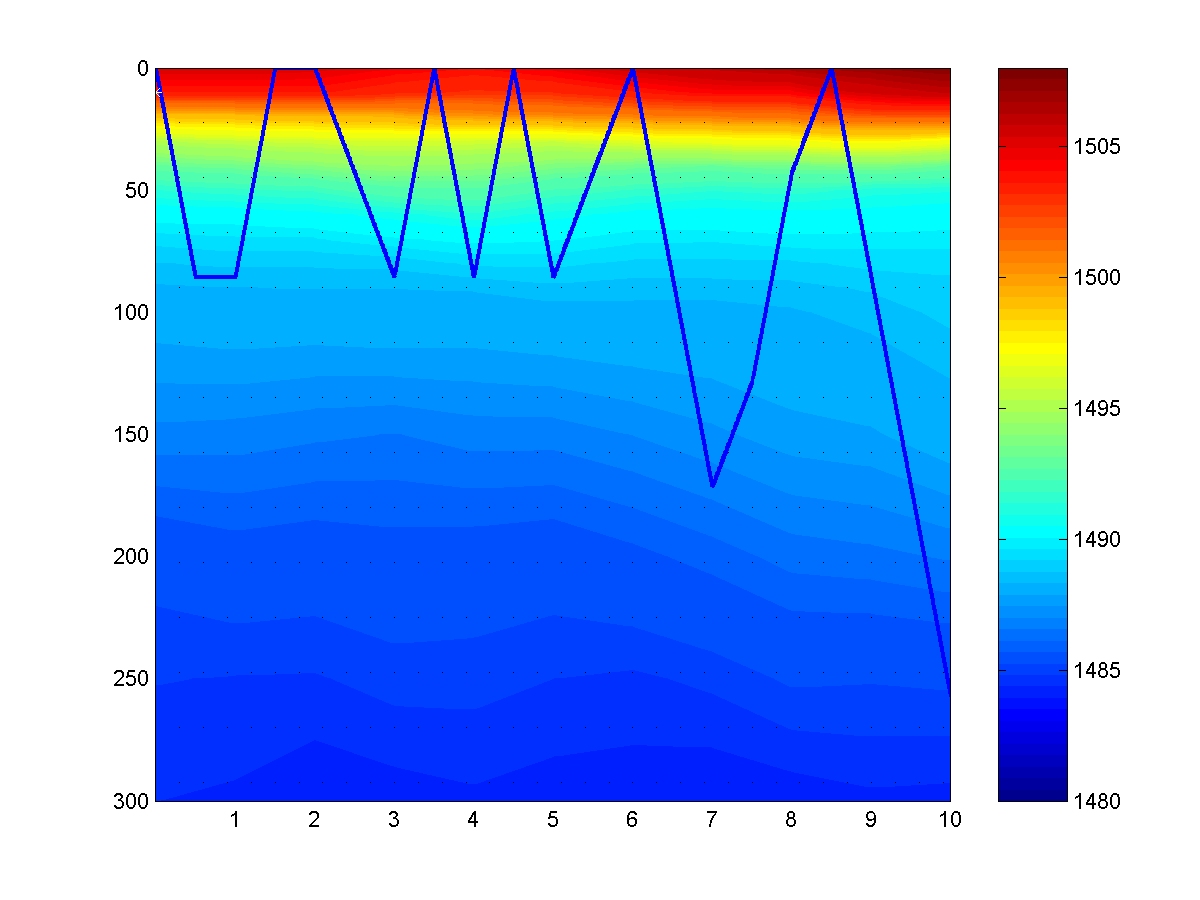
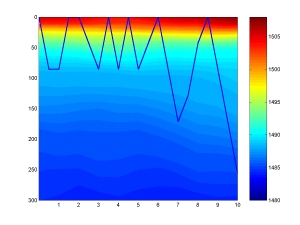
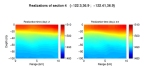
Optimized path for MIT-AUV, based on linear programming
and RAM-HOPS predictions. [ZOOM]
|
|
|
|
|
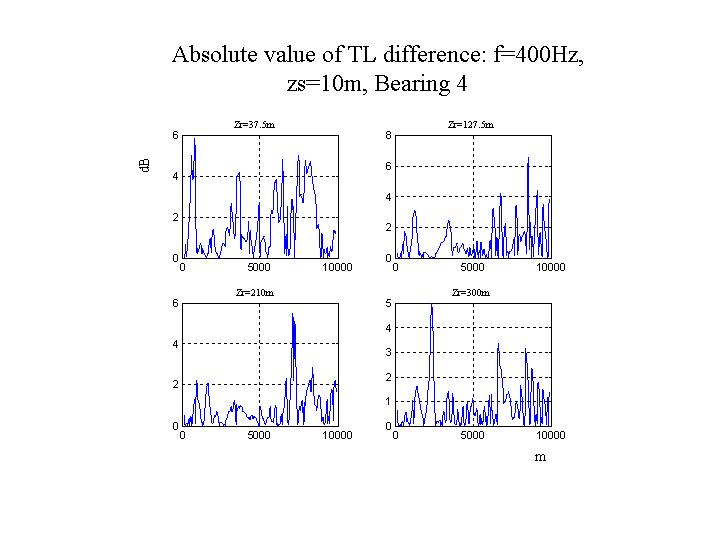
Difference in transmission loss (TL)
as a function of range, for a source of 400Hz at 10m depth
and for four receivers at 37.5, 127.5, 210 and 300 m depth.
TL was computed using RAMS.
|
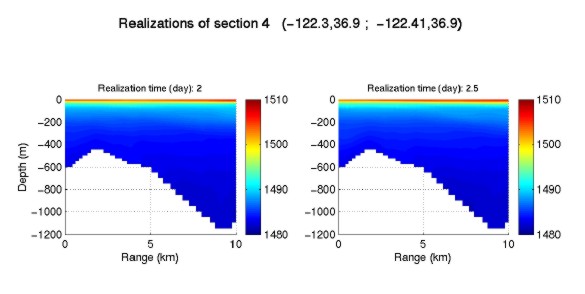
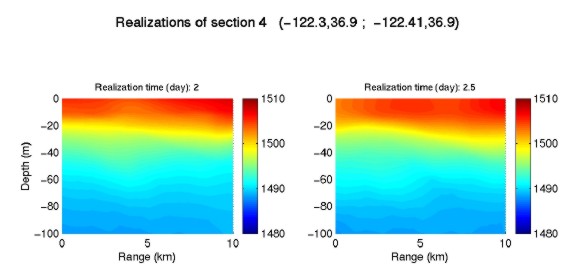
Two HOPS forecast realisations of
the sound-speed section corresponding to bearing 4
[Morning and Afternoon]
|
Zoom over 0-100m depths in two HOPS sections.
Notice variations in thermocline properties (its slopes,
advected plumes and eddies)
|