This research is part of a large initiative sponsored by the Office of Naval Research
which aims to field and operate a
prototype distributed remote surveillance system based on glider
and AUV technology. One of the largest challenges in autonomous
vehicles development and operation is to build a level of
intelligence and adaptation in the systems that would allow them to
respond to an unexpected environment and optimally perform their
tasks as these conditions change. One possible solution involves
allowing each vehicle to respond to their local observations and share those
responses with the network. However, this option does not include the
skills of anticipating limitations in both space and time to
provide optimal network responses covering domains extending up to
several acoustic ranges. To solve this limitation accurate
numerical modeling and observations analysis are required, along
with the likelihood of wrongful estimates for specific
applications. These two elements can then be combined with the
network details to produce an overall network response.
During the recently completed Kauai-09 exercise (28 July - 8 August), our Multidisciplinary Simulation, Estimation, and Assimilation Systems
(MSEAS) group provided dynamical ocean and acoustic predictions in real-time including guidance for optimal ocean and acoustic sampling. We led the Environmental Sensing and Adaptation team of scientists and engineers.
The ocean conditions were initialized using historical knowledge of the region determined from literature, sea surface height (SSH),
sea surface temperature (SST) and data of opportunity. Ocean predictions were then generated using an improved free-surface, tidally
forced ocean modeling system, as part of our new MSEAS system.
Acoustic predictions were generated using the RAM acoustic model and newly developed parallel
software. With this new parallel acoustic software, we can compute the whole "acoustic climate"
in a three-dimensional region, providing transmission
loss (TL) for any source and receiver locations in the region as a function of time and frequency.
The exercise provided significant insight into the regional ocean features and dynamics, including:
- Two main current features are often present: south of Kauai, the Hawaiian Lee Current (HLC); to the north, the North Hawaiian Ridge Current (NHRC).
- The NHRC can sometimes come across the Kauai Channel and merge with the HLC to the south of Kauai: this occurred at times during Kauai-2009.
- Flow reversal also occur, with inflows from the Kaulakahi Channel (between Niihau and Kauai): this took place occasionally during Kauai-2009.
- Atmospheric forcing strongly affects these patterns: strengthening trade winds lead to stronger Ekman transports northwestwardly, and vice versa.
- In summary, overall circulation is driven by the two northwestward currents, the HLC and the NHRC, by larger scale eddies (seen in SSH)
and by atmospheric forcing (when winds are strong).
- Tidal effects perturb these features, modifying their mean shapes and mean amplitudes over time.
The illustrations below provide examples of the coupled ocean-acoustic forecasts.
Optimal adative sampling guidance was also provided during the exercise.
Example of Ocean Predictions
|
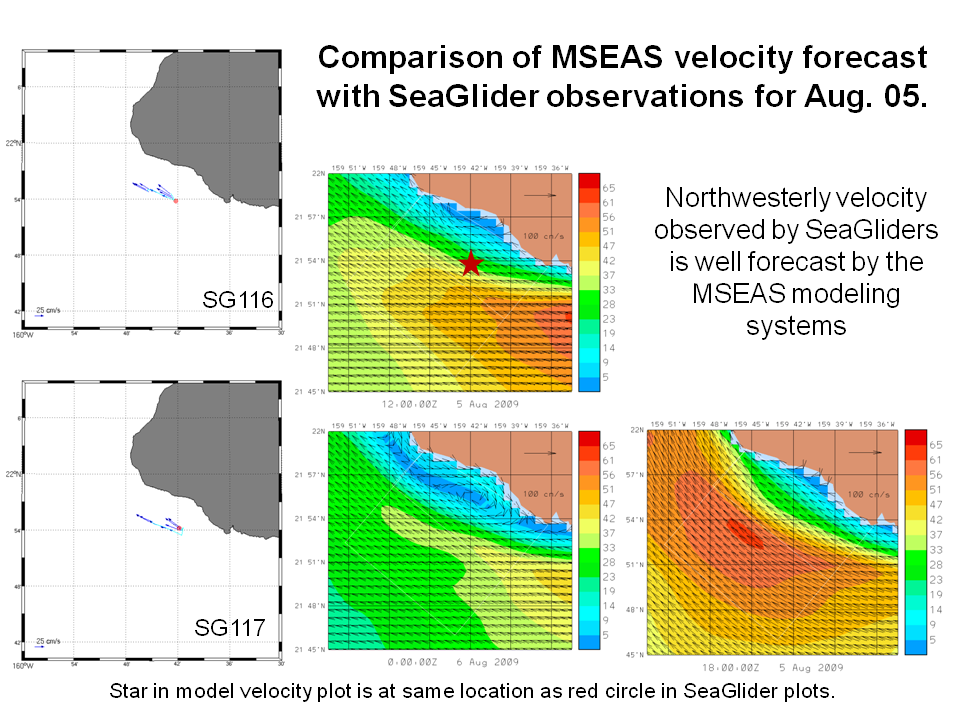
Our velocity forecasts for Aug. 05 averaged from 0 to 200m depths in the area indicated a broad and strengthening northwest flow in the channel in response
to the strengthening trade winds. This northwest flow was forecast to cover the whole area on the following day, between 15Z and 18Z on Aug 06. This flow was forecast to be
modulated by eddying and tidal effects, but the mean was predicted to be steady and mainly wind-driven.
Top currents at 25m in the area were forecast to reach 60cm/s on 5 Aug 18Z and on 6 Aug 18Z. Surface currents were forecast to be stronger. Even at 200m, top currents
at these times were forecast to be 40cm/s. This provides very challenging conditions for gliders.
Weaker currents at 25m in the area are forecast around 00Z and 12Z (2pm and 2am HST). Knowledege of the time-varying conditions may be used to plan operations that require weaker currents.
The figures at right compare the data collected from UW-APL SeaGliders to these MSEAS forecast issued on Wed Aug 05. This was a forecast from 04 Aug 14Z to 7 Aug 00Z.
These figures illustrate the fact that the predictions accurately reflected the velocities determined from the gliders as well as how predictions of internal tides are sustained in
simulations beyond the last data assimilation time (see dotted line on the slide to the right).
|

|
Example of Acoustic Predictions
|
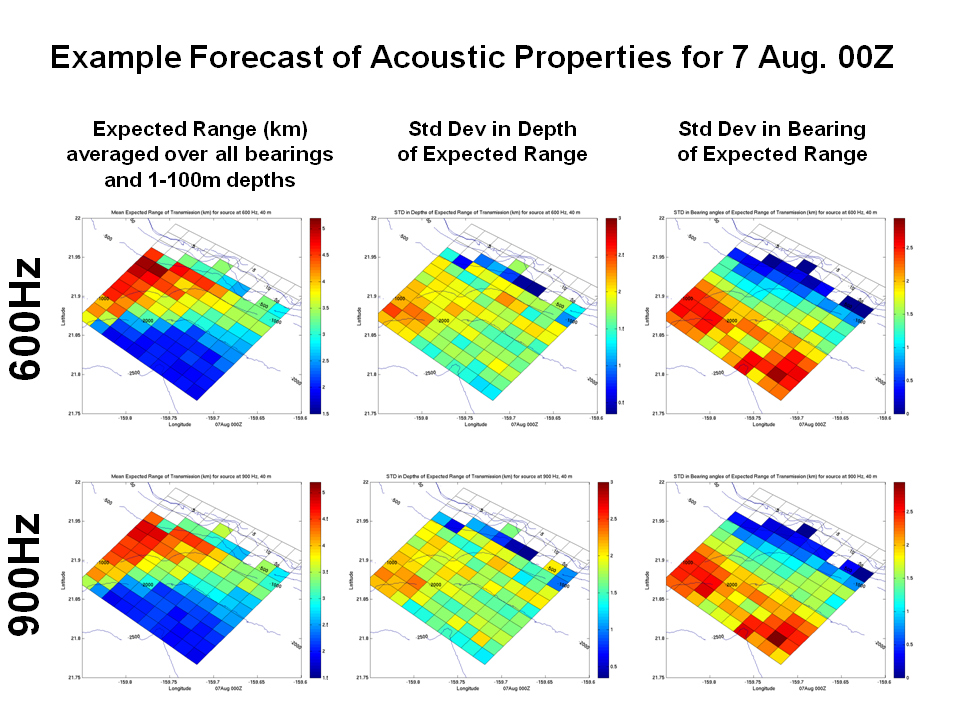
During the exercise, forecasts were provided of sound velocity and transmission loss maps at 600Hz and 900Hz. Examples of those forecasts are shown in the two slides to the right.
The forecasts illustrate that better acoustic performance could be expected in the northwest sides of the domain, along
the 500m or a somewhat deeper isobath. This is where we predicted the best transmission capabilities for a source at 40m, both at 600Hz and 900hz, especially for along-slope
propagation.
The mean expected range at 600Hz, 40m source was forecast to have a pattern which was generally linked to bathymetry, but was forecast to be smaller on Aug 07 as compared to Aug 06
in the deeper parts of the area (beyond 2000m depth), but a bit larger over the shallow (less than 500m) depths. The std dev in bearing angle was, when compared to the Aug 06 00Z
situation, smaller in the shallow parts (less than 500-800m) but similar elsewhere.
|

|
This research is based on our project on persistent littoral surveilance. That research is described here.
Return to top of document
Return to the MSEAS home page