

Affordable Gigaton-scale Carbon Sequestration
|
P.F.J. Lermusiaux, M. Doshi, P.J. Haley, Jr., C. Mirabito Massachusetts Institute of Technology
|
C. Tomlin, M. Wiggert UC Berkeley N. Julian, J. Zerger Phykos |
Project Summary Ongoing MIT-MSEAS Research Additional Links MSEAS Project-supported Publications Background Information
|
|
| This research is sponsored by C3 AI. | |||
Project Summary
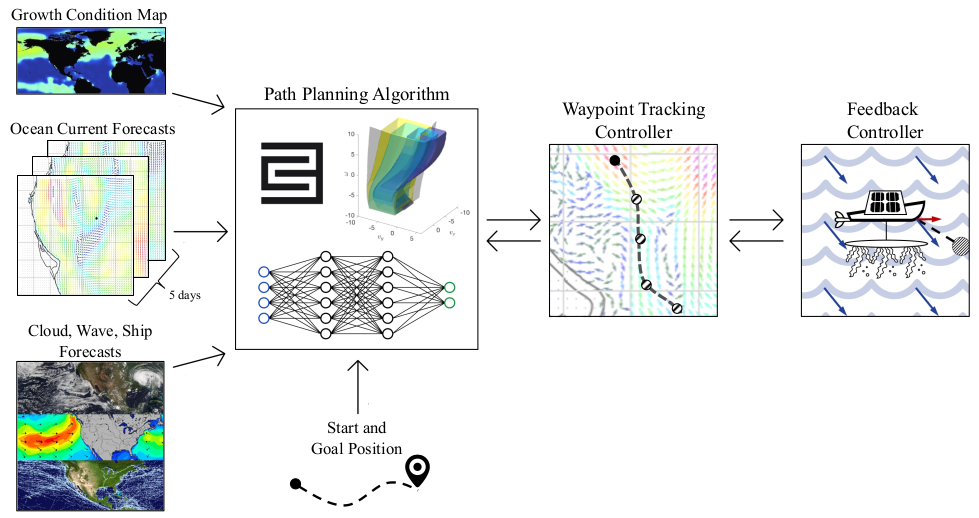
In this research we combine of probabilistic ocean modeling and control approaches such as reachability with machine learning for optimal path-planning algorithms in strong uncertain dynamic fields. MIT-MSEAS research tasks include: (1) Realistic Data-driven Ocean and Platform Modeling and Simulation; (2) Optimal Path Planning with High-Dimensional Reachability, Plan Adaptation and Learning; (3) Learning a Final Value Function for long-term Anticipation and Deep Reinforcement Learning Algorithms.
Background information is available below.
| Top of page |
Ongoing MIT-MSEAS Research
Our MIT-MSEAS three main research thrusts are: (1) Realistic data-driven ocean and platform modeling and simulation; (2) High-level path-planning and online adaption of this path leveraging observations and physics-based model predictions with machine learning closures; and (3) Receding horizon planning with a learned final value function for long-term anticipation and deep reinforcement learning in parts of the control architecture for its ability to adapt to uncertainty through training.Publications
MSEAS Project-supported Publications
| Top of page |
Additional Links
| Top of page |
Background Information
Carbon sequestration is critical to stabilize our climate and mitigate the multitude of adverse effects of climate change. However, most existing approaches are not scalable or prohibitively expensive. A promising approach builds on the open ocean as an untapped region for harvesting solar energy and growing seaweed that use photosynthesis to fixate dissolved CO2 into biomass. Once this biomass reaches the deep ocean it is locked-up for millennia. Floating platforms growing and depositing seaweed autonomously could scale this natural process. However, steering those platforms with strong motors is prohibitively expensive. We propose to develop control and learning methods which reliably navigate floating platforms by hitchhiking ocean currents, only using minimal solar-powered propulsion to nudge them into the right currents and optimal light and temperature conditions. This is challenging because platforms are severely energy and actuation constrained, and ocean fields are non-linear, dynamic, and predictions are highly uncertain. If we succeed the cost per ton CO2 sequestered by such platforms will be significantly below any other scalable sequestration approach, making it a critical enabler for affordable gigaton-scale sequestration. We explore the combination of probabilistic ocean modeling and control approaches with machine learning for path-planning algorithms.
| Top of page |