

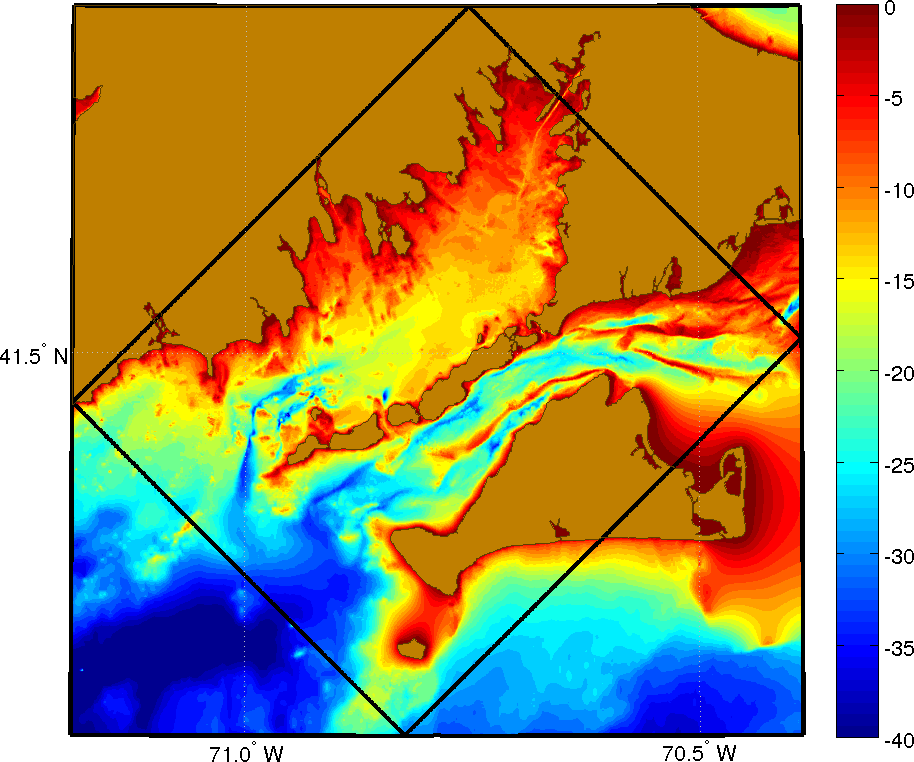
Vineyard Sound and Buzzards Bay Region - July 2015
|
P.F.J. Lermusiaux, P.J. Haley, Jr., C. Mirabito, T. Lolla, D. Subramani, A. Jain, C. Tang Massachusetts Institute of Technology
|
Real-time modeling Data sources Autonomy preparation |
|

|
AforSSIE Project Main Page 2016 Sea Exercises page
These real-time sea exercises are to further develop our multi-scale MSEAS ocean modeling systems to be used as real-time inputs to optimal path planning. The time-optimal path planning is for AUVs to intercept moving targets in the fastest time and then engage with the targets, for example, underway surface vessels. The MIT real-time exercises utilize inputs from colleagues from WHOI (Glen Gawarkiewicz and Ben Allen) and Lincoln Lab (Joe Edwards and Kristen Railey).
 |
 |
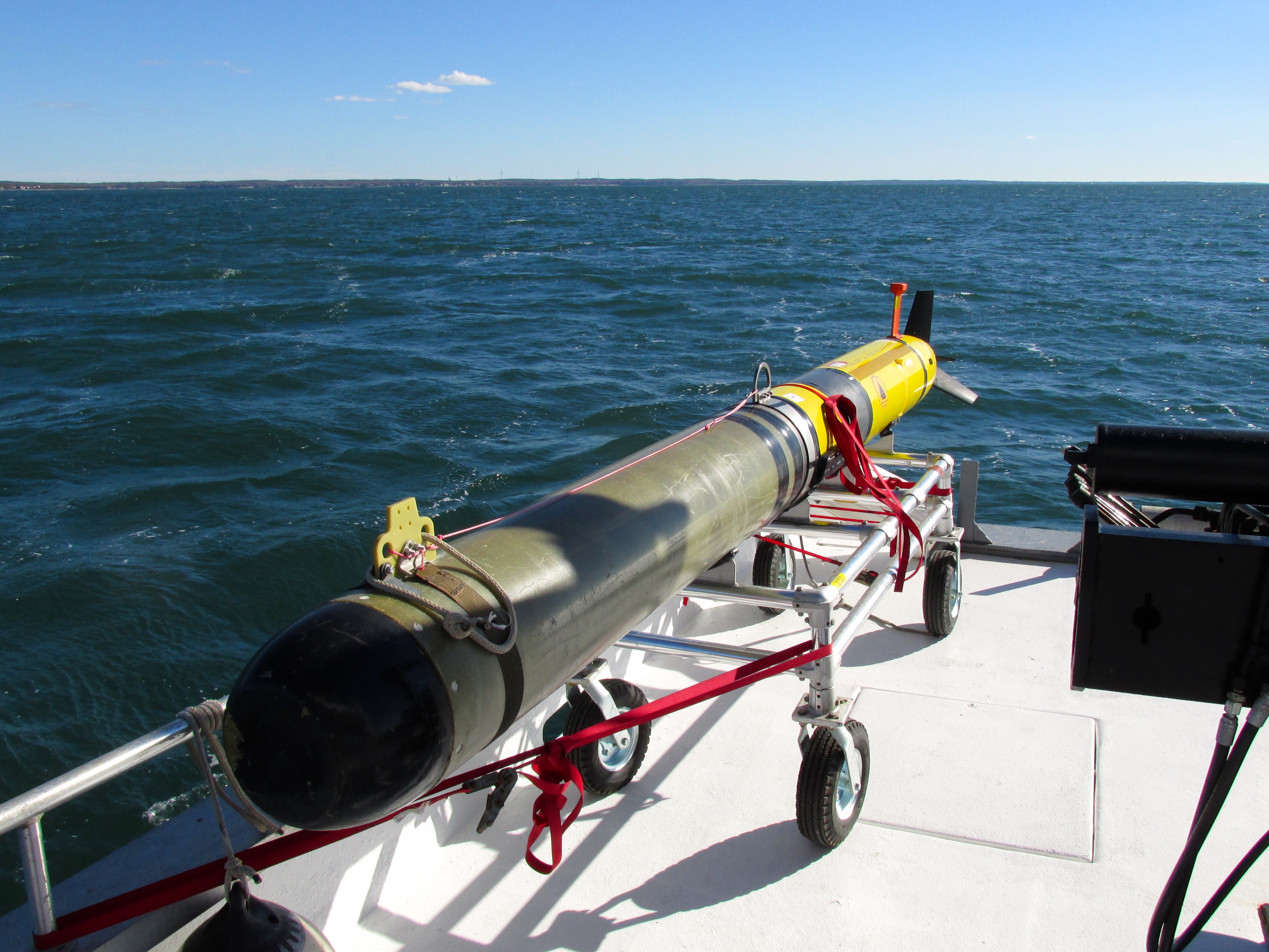
| REMUS AUV and vehicle tracks taken during the sea exercise. Images courtesy of Kristen Railey (MIT Lincoln Lab). | |
Real-time MSEAS modeling and processed information
- Atmospheric forcing plots, MSEAS processing of NCEP HIRESW forcast, 5km WRF model
- MSEAS-processed Buzzards Bay current velocities at selected NOAA/NOS stations
- MSEAS-processed MVCO ocean synoptic data
- MSEAS ocean modeling products:
7-18 7-19 7-20 7-21 7-22 7-23 7-24 7-25 7-26 7-27 7-28 7-29 7-30 7-31 MSEAS-PE real-time modeling X X X X X X X X X X X X X X
| Top of page |
Data sources
- Ocean synoptic
- Ocean historical/climatological
- Atmospheric forcing
- Weather Research and Forecasting (WRF) Model Real-Time Forecasts
- National Centers for Environmental Prediction (NCEP) products:
| Top of page |
Autonomy preparation
|
|
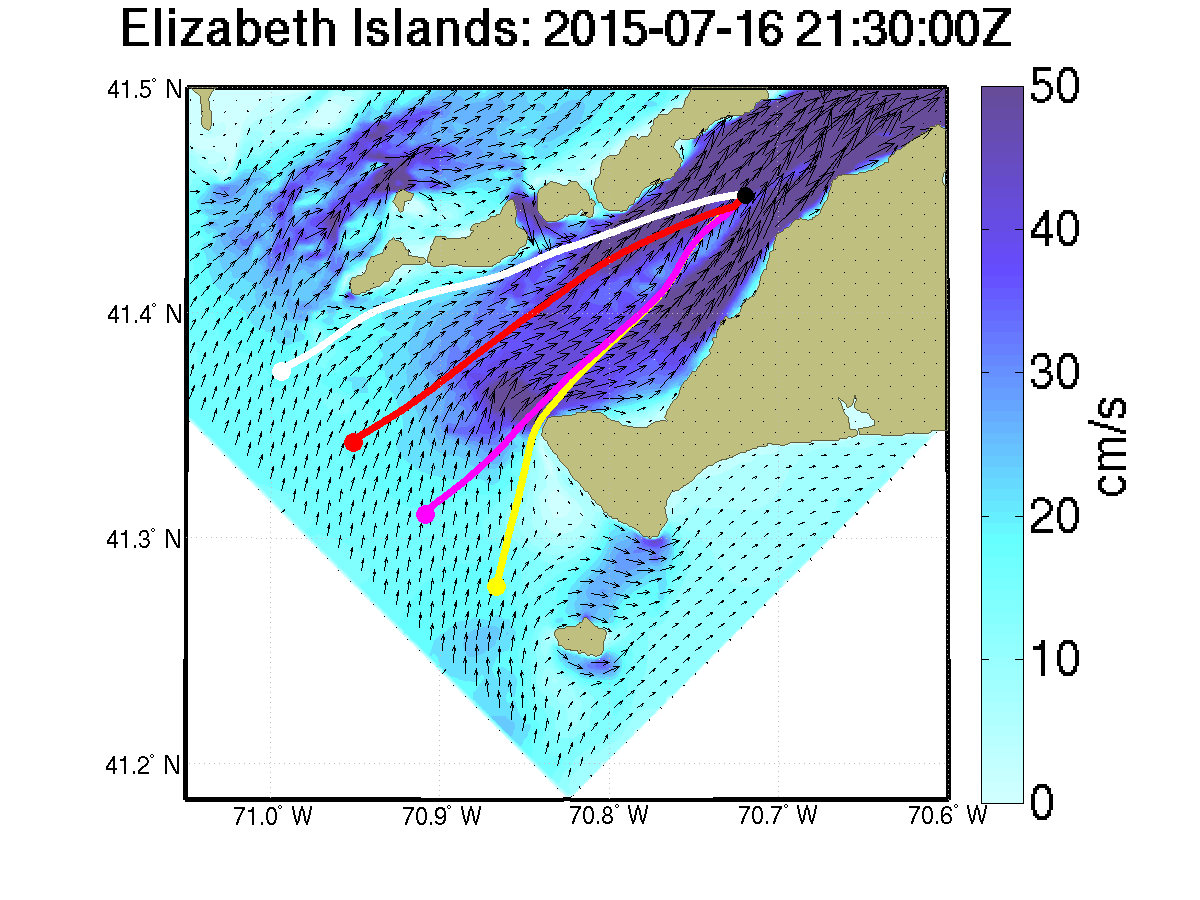
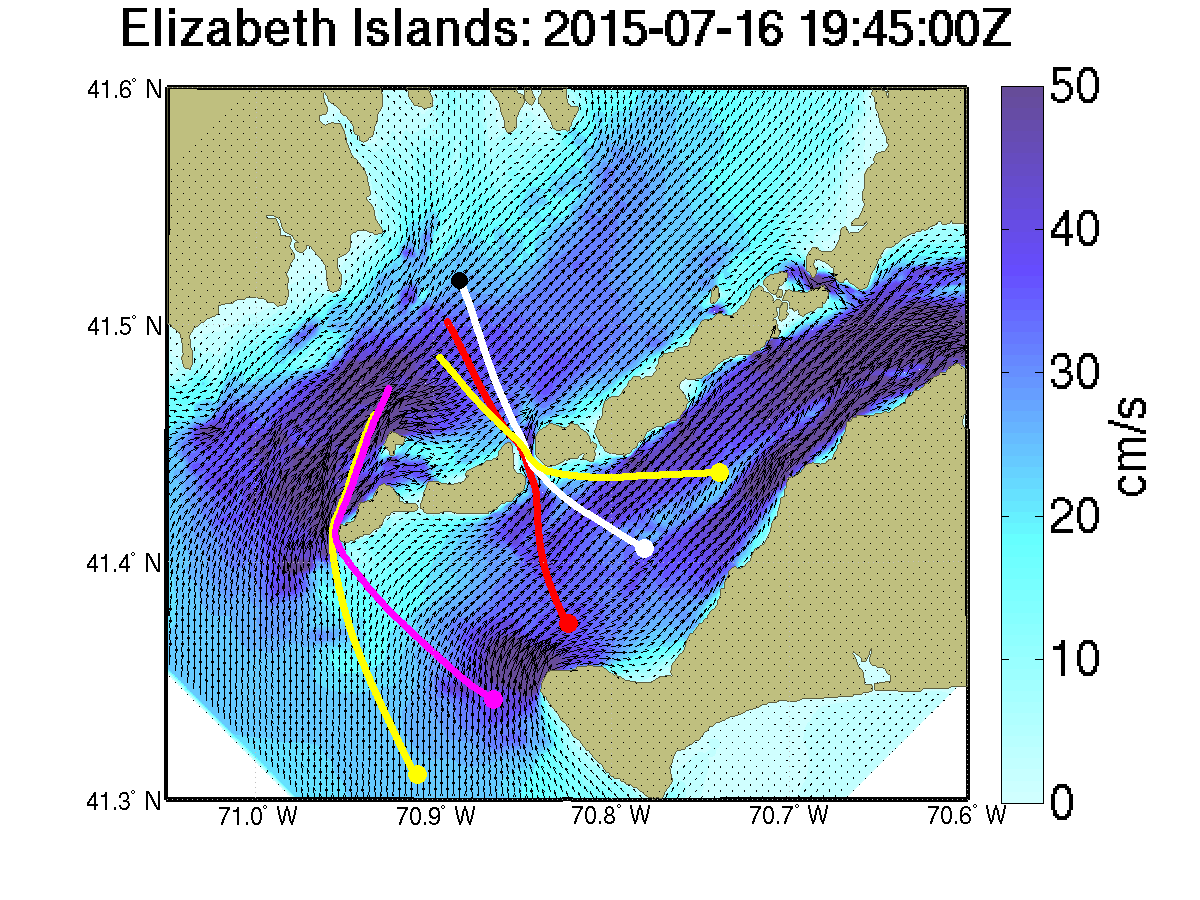
| Optimal paths for 4 independent AUVs intercepting a moving target (black) in Vineyard Sound. The target is moving northeast at approximately 1.15 kt; the maximum AUV engine speed is approximately 2 kt. All AUVs are deployed on July 16, 2015 at 1545Z. | Optimal paths for 5 independent AUVs deployed at July 16, 2015 at 1545Z from Vineyard Sound intercepting a moving target (black) located in Buzzards Bay. The target is moving southwest at 3 kt; the maximum AUV engine speed is approximately 2 kt. |
|
|
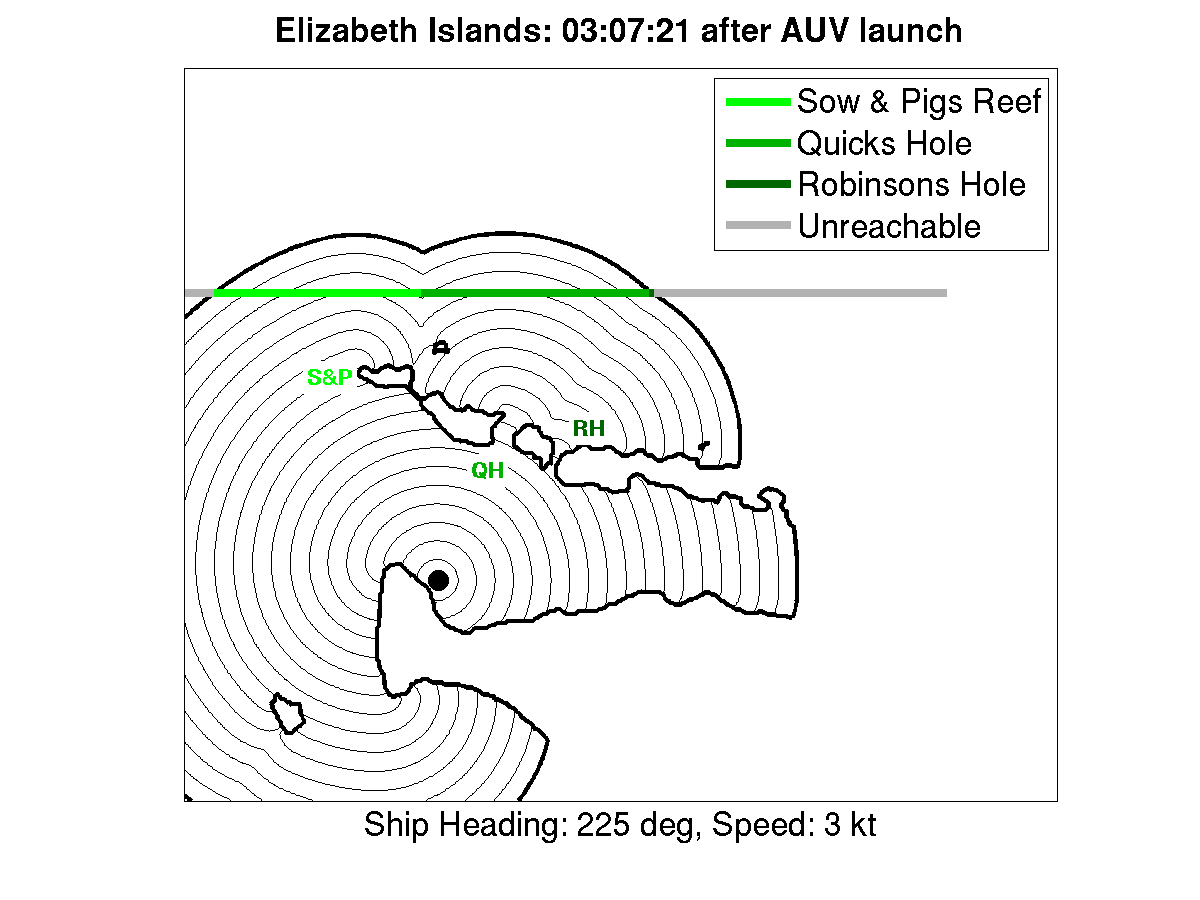
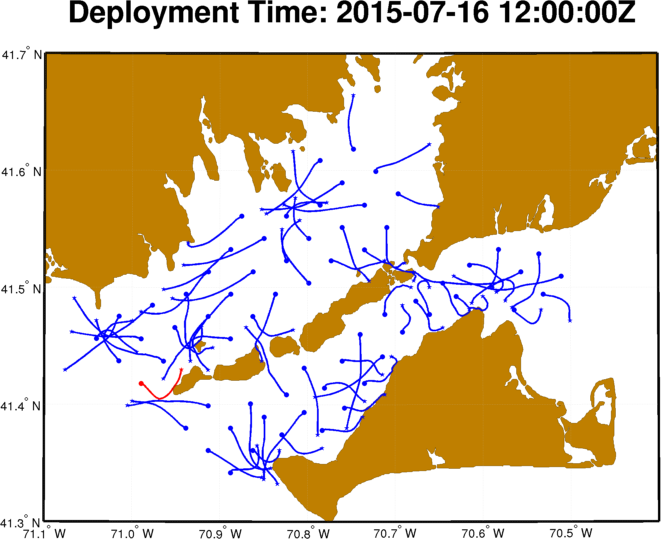
| Level set propagation and color-coded optimal routes for a single AUV launched from a point near Menemsha, MA intercepting a ship in Buzzards Bay. The maximum AUV engine speed is approximately 3.9 kt. The effect of currents is ignored. | Time-optimal AUV paths most affected by the current and/or coastal geometry at each starting point (blue), with the path most affected of these indicated in red. The maximum AUV engine speed is approximately 1 kt. |
| Top of page |