

Vineyard Sound and Buzzards Bay Region - October and December 2016
|
P.F.J. Lermusiaux, P.J. Haley, Jr., C. Mirabito, D. Subramani, S. Jana, C. Kulkarni Massachusetts Institute of Technology
|
Real-time modeling Real-time optimal path planning Data sources Autonomy preparation |
|
|
AforSSIE Project Main Page 2015 Sea Exercises page
These real-time sea exercises are to: (i) Apply in real-time at sea the time-optimal autonomy theory and software developed at MIT, and (ii) further develop, validate and apply our multi-scale MSEAS ocean modeling systems to be used as inputs to such optimal path planning. The time-optimal path planning is for AUVs to reach specific regions in fastest time. The MIT real-time exercises are completed in collaboration with colleagues from WHOI (Andy Girard, Diana Wickman, and Ben Allen) and Lincoln Lab (Joe Edwards and Josh Smith).
 |
 |
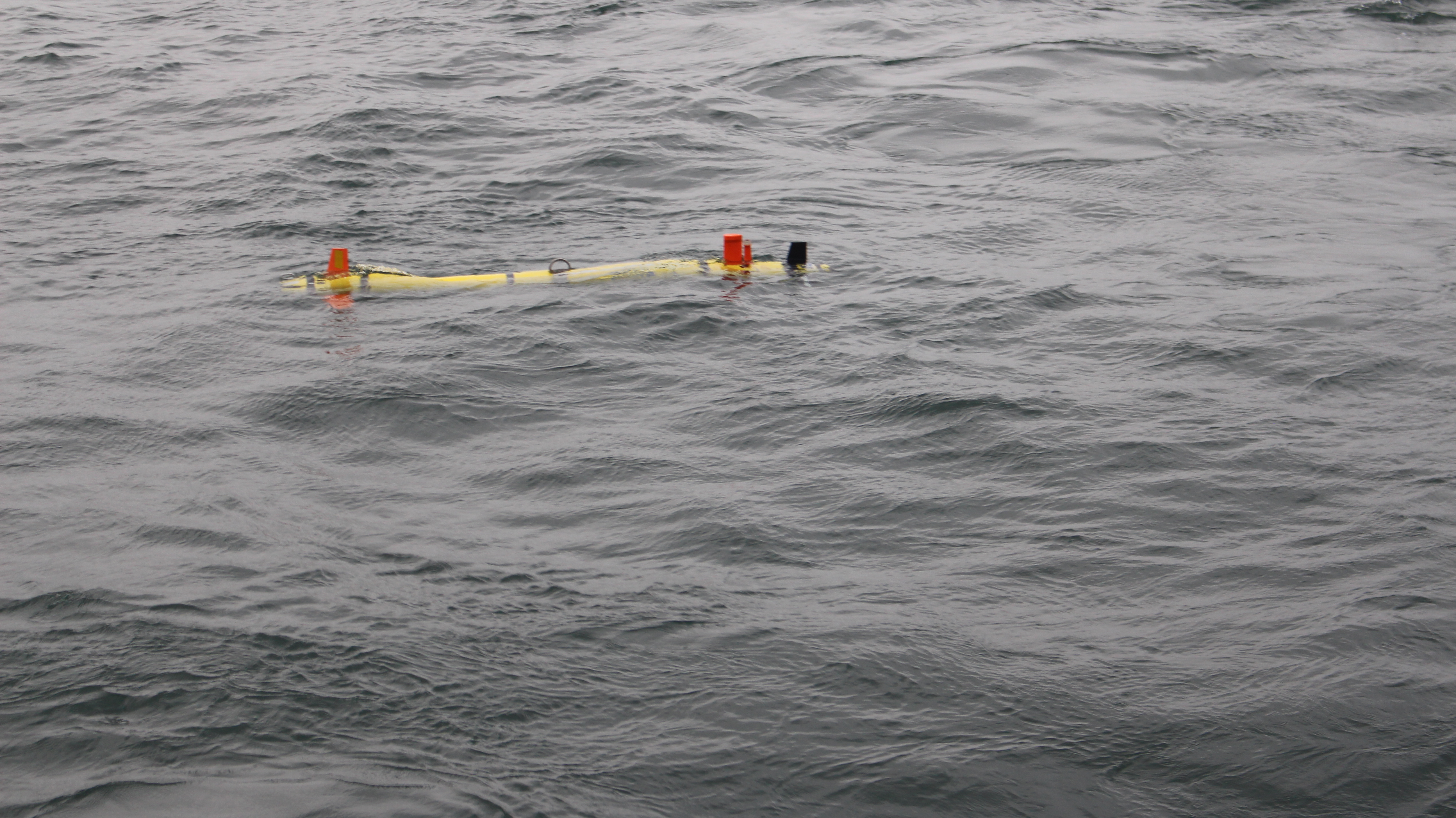 |
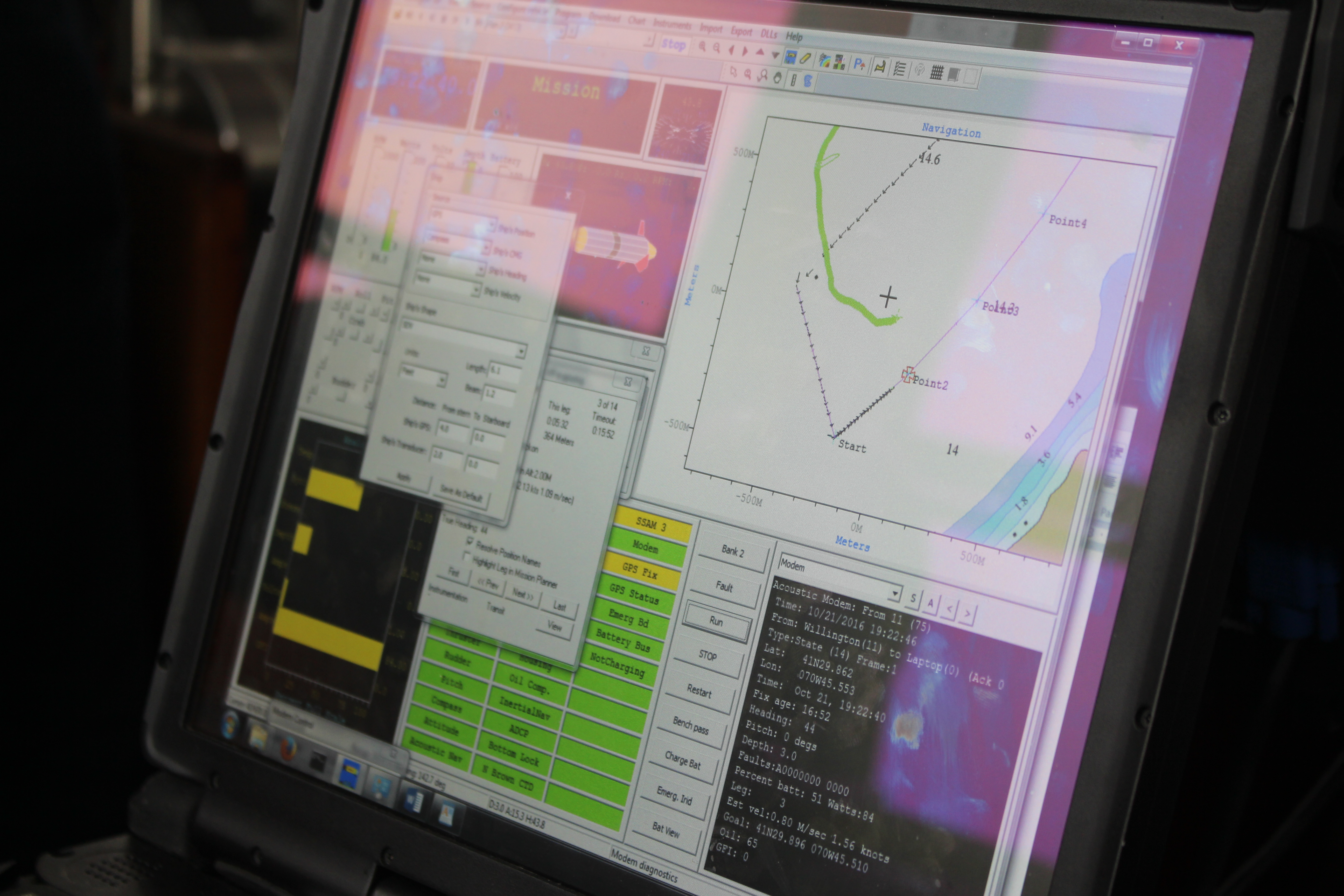
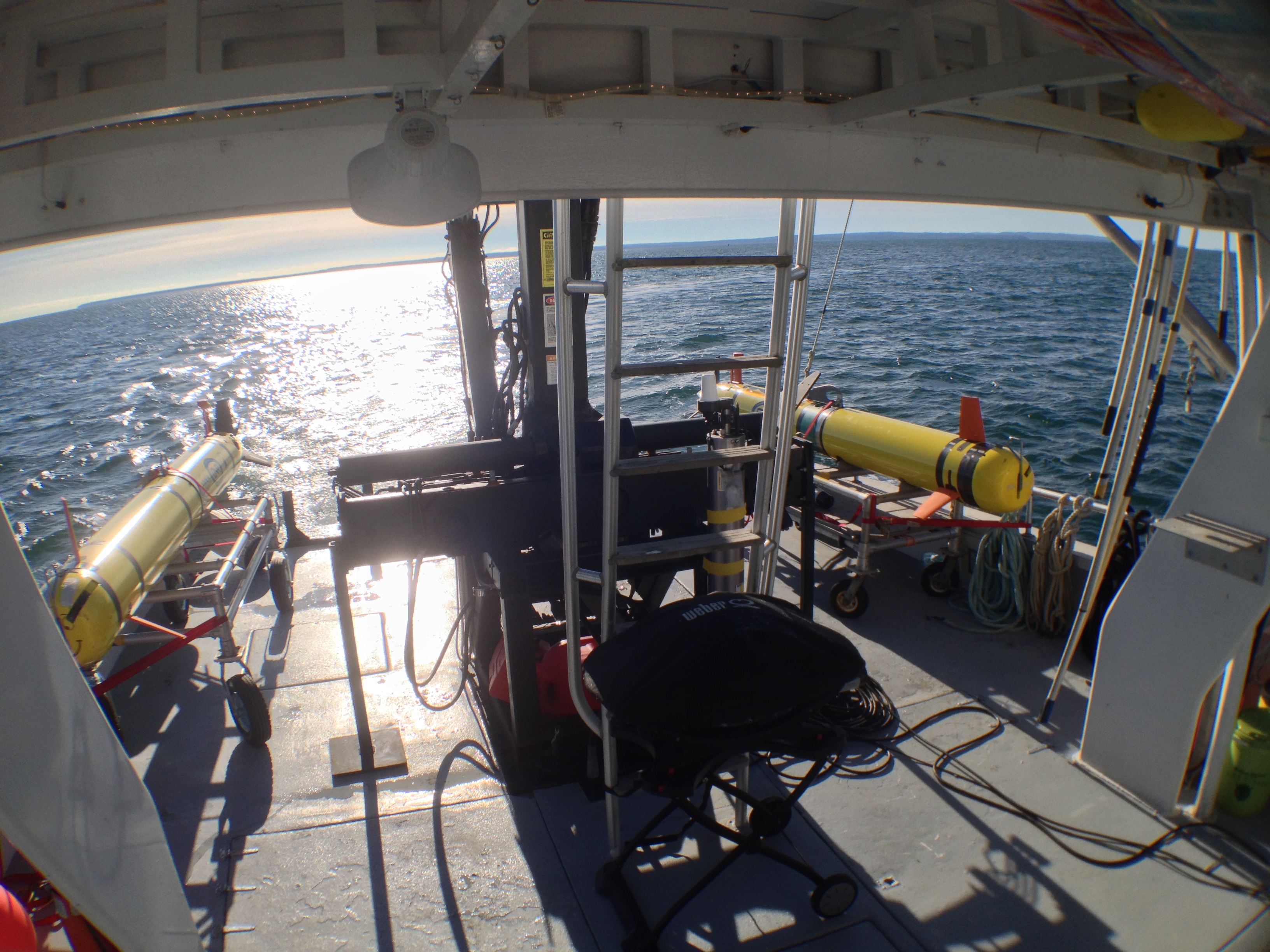
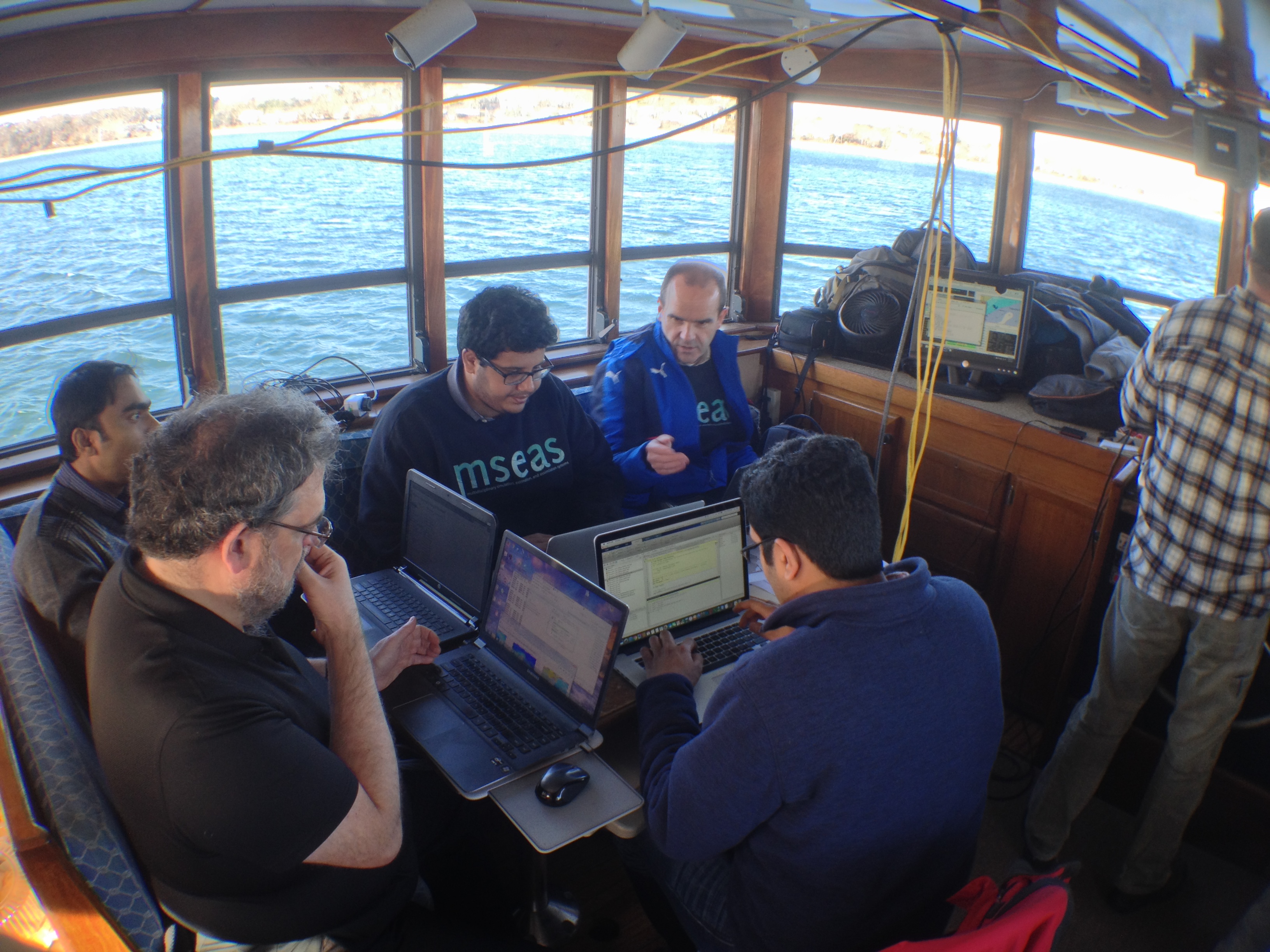
| Left: Mission computer used to track the REMUS 600 AUV during the sea exercise; Center: Deploying the AUV from the R/V Discovery; Right: REMUS 600 in action. Images courtesy of Deepak Subramani (MIT-MSEAS). | ||
Real-time MSEAS modeling and processed information
Synoptic
- Vineyard Sound Marine Forecast (Weather Underground)
- NOAA Graphical Forecasts - Boston, MA
- Atmospheric forcing plots:
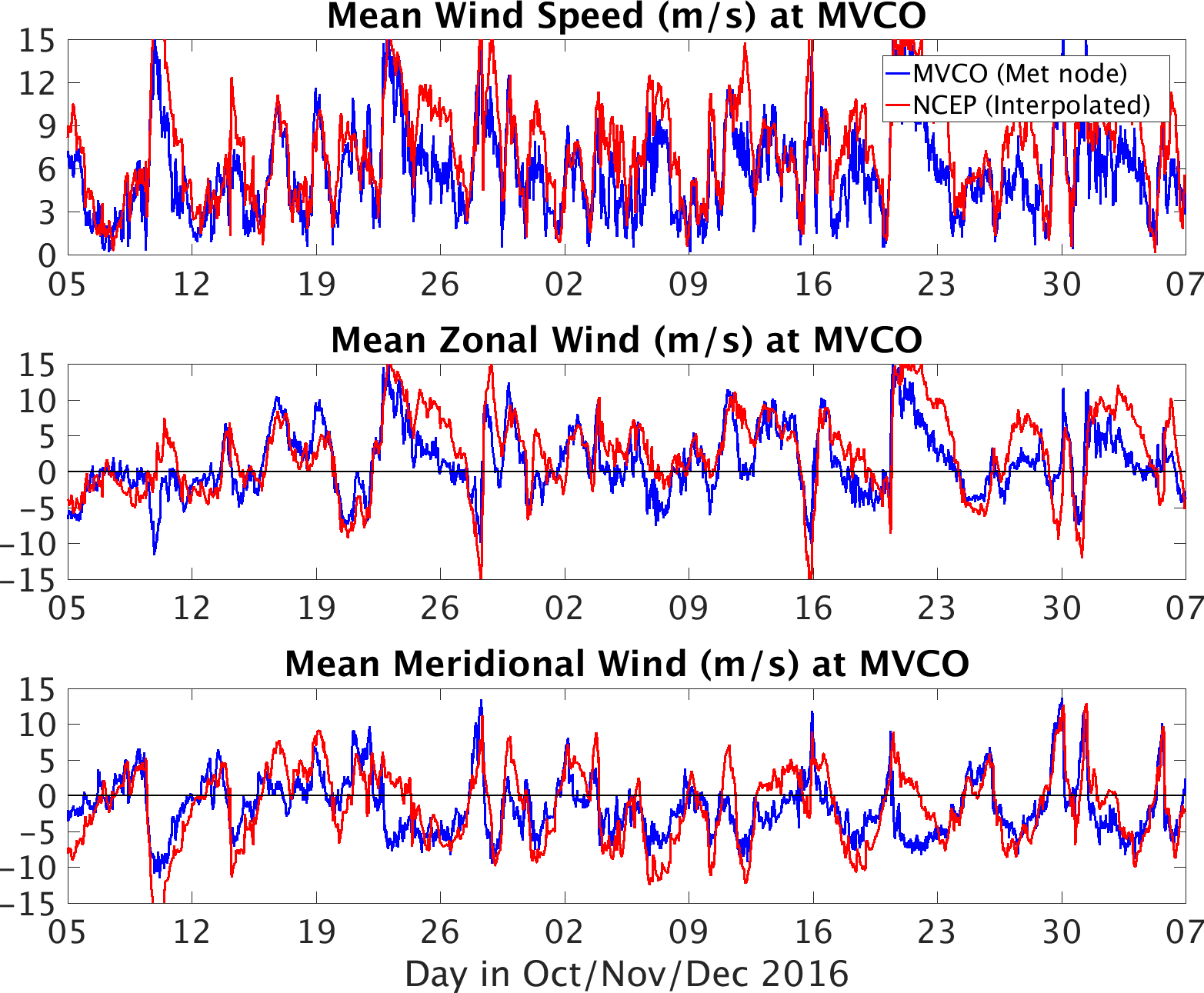
- MSEAS processing of NCEP HIRESW forecast, 5km WRF model:
October 2016 S M T W T F S 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 November 2016 S M T W T F S 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 December 2016 S M T W T F S 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 - Daily average wind stress, E-P, heat flux, and SW Radiation
- Comparison of MVCO wind data and NCEP simulations
- MSEAS-PE forcing data:
- MSEAS processing of NCEP HIRESW forecast, 5km WRF model:
- MSEAS-processed MVCO ocean synoptic data
- Tides in Vineyard Sound
- MSEAS Ocean Forecast
Run Date Nov 16 Nov 17 Nov 18 Surface velocity X X X
{kind=link}
| Top of page |
Real-time Optimal Path Planning
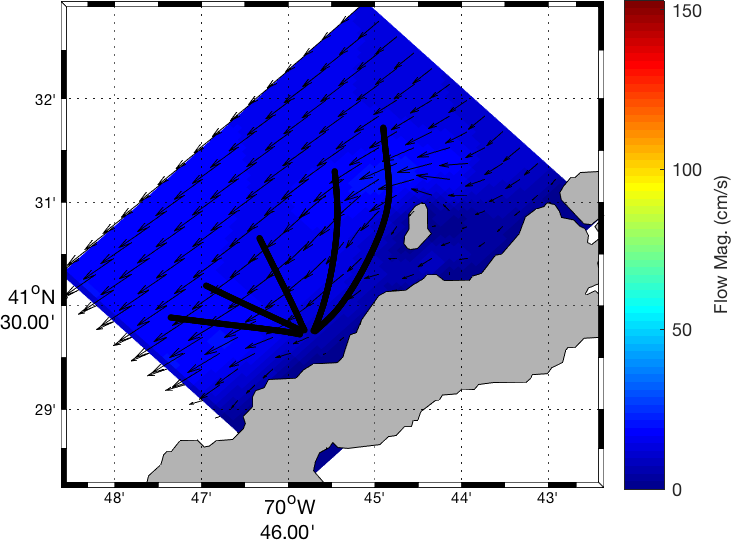
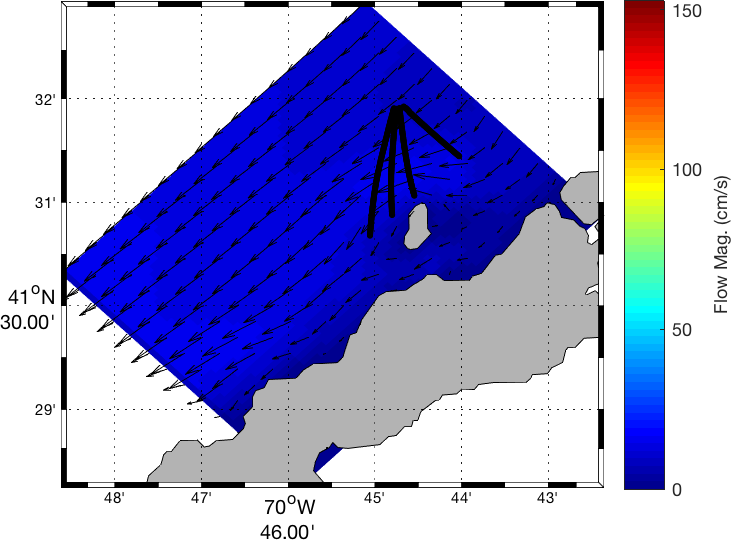
| Single Time-Optimal AUV: Our first sea exercise occurred on 21 Oct 2016. Our ocean forecast was for 3 days starting from 00 UTC, 19 Oct 2016 (20 EDT, 18 Oct 2016) using the latest atmospheric forecasts available at 12 UTC, 20 Oct 2016. The currents at 3 m depth (model domain shown here) were extracted for the horizon 13 UTC to 22 UTC (i.e., 09 to 18 EDT) for path planning of the REMUS 600. Largest currents in the region reach 4 kts. The REMUS 600 was launched and recovered from the R/V Discovery. We initially identified three regions based on our broad search. Due to weather and sea conditions, we adaptively computed more than 100 optimal paths for multiple start and end points and start times in three regions and executed two missions near Weepecket islands. The way-points were planned and provided to the REMUS 600 navigation system in the required format. The two fastest-time missions were completed by the AUV, critically in a time as forecast by our path planning. |

|
|
| Two AUV races — Time Optimal vs. Shortest Distance: A second set of exercises with two identical AUVs racing each other were successfully completed on 6 Dec 2016. One AUV was time-optimal and the other took the shortest distance. A total of 3 missions were completed: off Nobska Point, off the NW coast of Martha's Vineyard along the Middle Ground, and across northern Vineyard Sound from the Middle Ground to Nobska Point. They confirmed that our time-optimal AUV was the fastest. For example, for the second mission, the time-optimal AUV took about 90 minutes (as forecast) to reach the destination 10 km away, while the shortest distance AUV had only reached the midway point along its path (also as forecast). That was due to the currents variations, even though the paths were never more than 1 km apart. | ||
 |
 |
 |
| Top of page |
Data sources
- Ocean synoptic
- Ocean historical/climatological
- Atmospheric forcing
- Weather Research and Forecasting (WRF) Model Real-Time Forecasts
- National Centers for Environmental Prediction (NCEP) products:
| Top of page |