

Arabian Sea – February-April 2017
|
P.F.J. Lermusiaux, P.J. Haley, Jr., S. Jana, A. Gupta, C. Kulkarni, C. Mirabito, W. Ali, D. Subramani Massachusetts Institute of Technology Center for Ocean Engineering Mechanical Engineering Cambridge, Massachusetts
|
Real-time modeling Glider positions/data Data sources |
 |
 |
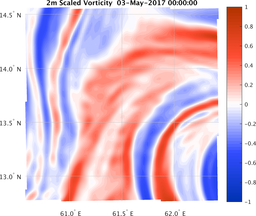
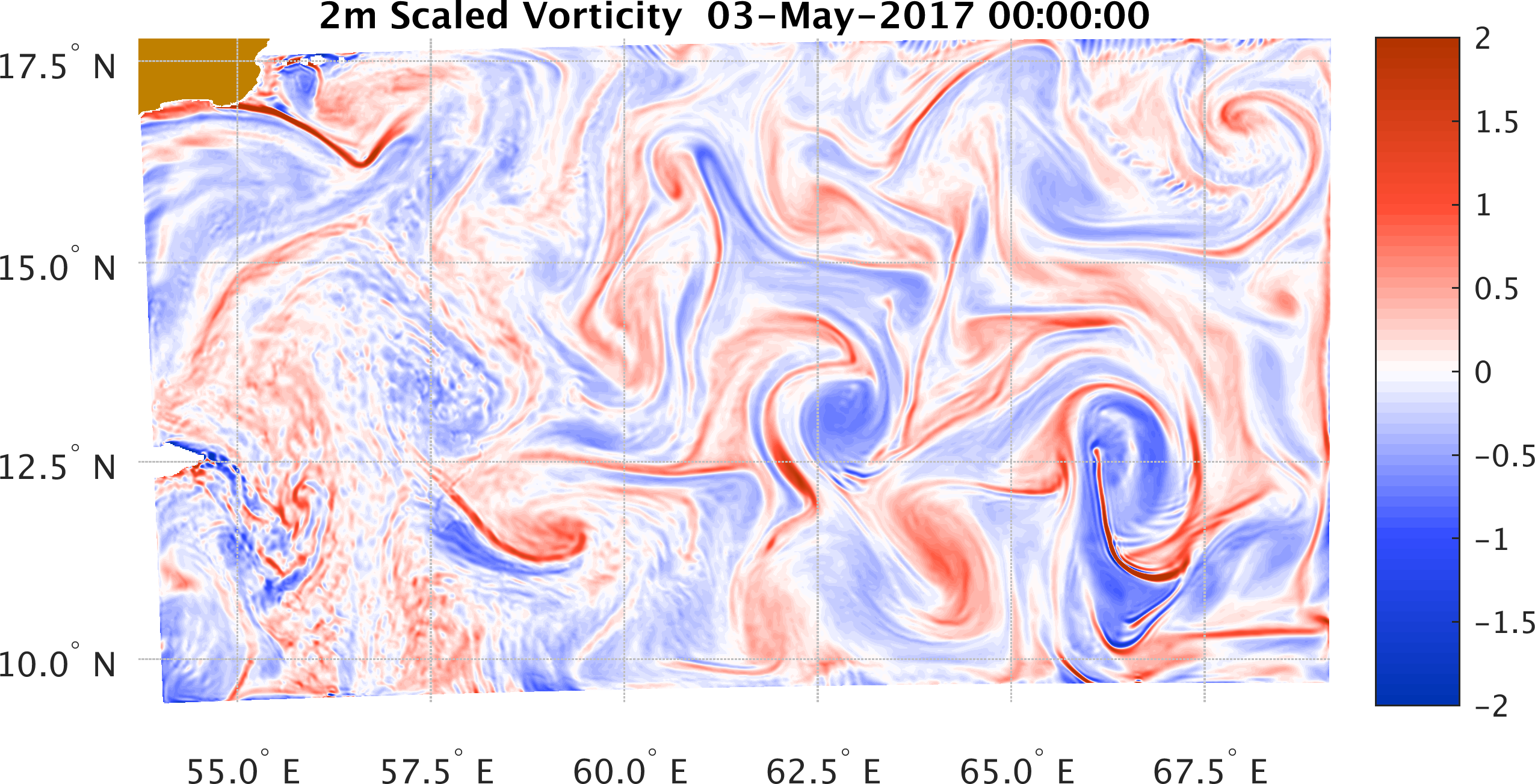
The NASCar-OPS Sea Exercise 2017 occurs in the Arabian Sea in February-April 2017. In collaboration with the DRI-NASCar team, our objectives are to utilize the MIT Multidisciplinary Simulation, Estimation, and Assimilation System (MSEAS) to: (i) forecast the regional high-resolution ocean fields and their probability, using our Error Subspace Statistical Estimation methodology; (ii) utilize these fields to forecast the reachability sets, reachability fronts, and time-optimal paths of underwater vehicles including gliders and floats; (iii) forecast the uncertainty of such reachability fields and optimal paths. We thank Dr. Andrey Shcherbina for his input, the HYCOM team for their real-time ocean fields, and the NCEP GFSp25 and NAVGEM 0p5 teams for their real-time atmospheric flux forecasts.
This research is sponsored by the Office of Naval Research.
Real-time MSEAS Ensemble Forecasting
- MSEAS ocean ensemble ESSE forecasts
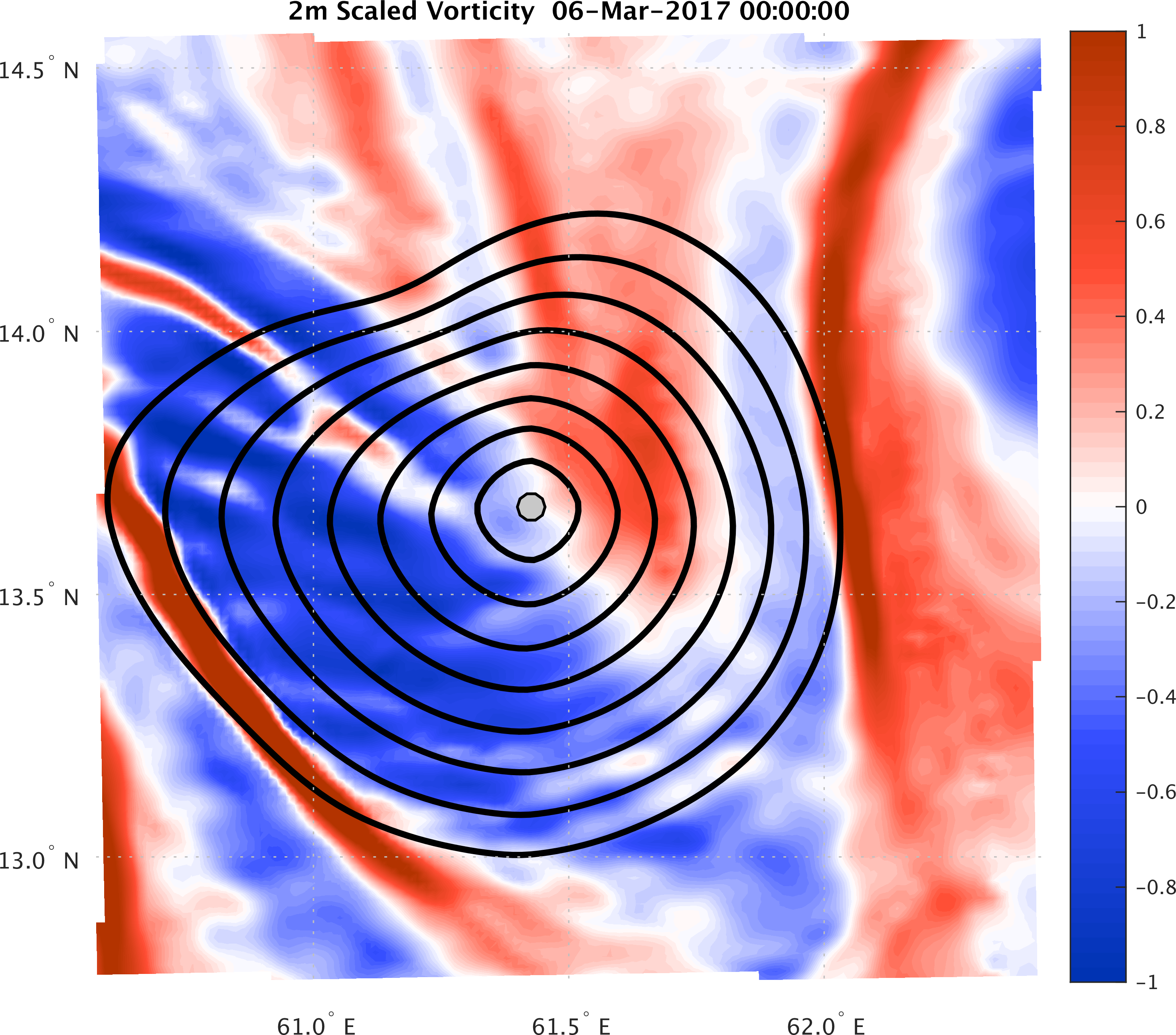
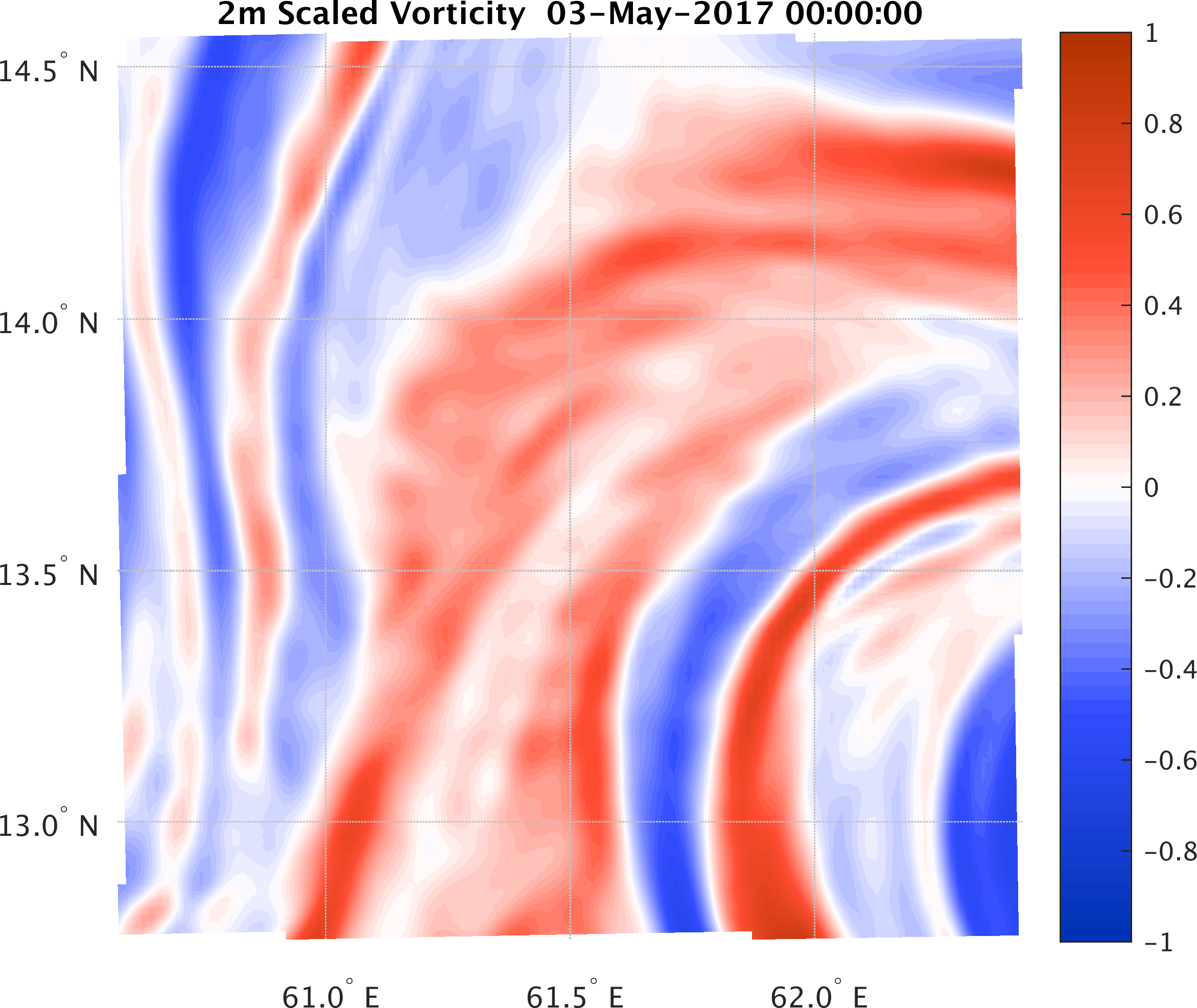
Real-Time Estimates of Present (03 May 0000Z) Environmental Conditions Large Domain (Arabian Sea) Small Domain (Central Arabian Sea) Northern Section Temperature 2m Vorticity Temperature 2m Vorticity Temperature Salinity 
Nowcast and Forecast Products
with dynamics and uncertainty descriptionsAnalyses and Forecasts Issued On April 1 2 5 9 13 17 21 25 29 Ocean
PhysicsHorizontal
MapsCentral Forecast X X X X X X X X X Operational
Vertical
SectionsCentral Forecast X X X X X X X X X Path Planning
and Reachability
FrontsGlider
Reachability
MapsCentral Forecast X X X X X X X X X Float Position Central Forecast X X X X X X X Nowcast and Forecast Products
with dynamics and uncertainty descriptionsAnalyses and Forecasts Issued On March April 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 1 2 Ocean
PhysicsHorizontal
MapsCentral Forecast X X X X X X X X X X X X X X X X X X X X X X X X X X X X X X X X X Mean and Uncertainty X X X X X X X X X X X X X X X X Operational
Vertical
SectionsCentral Forecast X X X X X X X X X X X X X X X X X X X X X X X X X X X X X X X X X Mean and Uncertainty X X X X X X X X X X X X X X X X Path Planning
and Reachability
FrontsGlider
Reachability
MapsCentral Forecast X X X X X X X X X X X X X X X X X X X X X X X X X X X X X Float Position Central Forecast X X X X X X X X X X X X X X X X X X Reachability Probablity X X X X X X X X X X Nowcast and Forecast Products
with dynamics and uncertainty descriptionsAnalyses and Forecasts Issued On February 9 10 11 12 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 Ocean Physics Horizontal Maps Central Forecast X X X X X X X X X X X X X X X X X X X Operational Vertical Sections Central Forecast X X X X X X X X X X X X X X X X X X X - MSEAS-processed atmospheric forcing flux forecasts:
NCEP GFSp25 NAVGEM 0p5 March 2017 S M T W T F S 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 February 2017 S M T W T F S 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 March 2017 S M T W T F S 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 February 2017 S M T W T F S 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 - WHOI ALAMO Float Summary


| Top of page |
Real-time Seaglider Positions and Data
Seaglider is a buoyancy driven autonomous underwater vehicle (AUV) developed by scientists and engineers at the University of Washington's School of Oceanography and Applied Physics Laboratory (APL).
- Real-time Seaglider Positions
- Seaglider Operations Summary
- Dive Results
- Additional links from ONR Arabian Sea (NASCar) Interior Working Group
| Top of page |
Data sources
- Ocean synoptic
- The Global Temperature and Salinity Profile Programme (GTSPP)
- National Data Buoy Center Real-Time & historical data from moored buoy & C-MAN stations
- Ocean historical/climatological
- The Global Temperature and Salinity Profile Programme (GTSPP)
- Data sets & products NOAA National Centers for Environmental Information
- World Ocean Database (WOD)
-
Northeast Fisheries Science Center Ecosystem Processes Division Oceanography Branch
NMFS. Includes data from CTDs, fish hauls, hull-mounted sensors, eMOLT
moorings, drifters, etc.
- Hydrographic Conditions of the Northeast Continental Shelf Northeast Fisheries Science Center Oceanography Branch
- Data/Mapping Interface Northeast Fisheries Science Center, Oceanography Branch
- Atmospheric forcing
- Weather Research and Forecasting (WRF) Model Real-Time Forecasts
- National Centers for Environmental Prediction (NCEP) products:
- Global Forecast System Model: version 4 (GFS), at 0.5 degree resolution (GFSp5) and also at 0.25 degree resolution (GFSp25)
- The European Centre for Medium-Range Weather Forecasts (ECMWF) ERA Intrim (global Re-Analysis)
- ESSO - Indian National Centre for Ocean Information Services (TropFlux project):
- Navy Global Environmental Model (NAVGEM) products:
| Top of page |