

Northern Arabian Sea Circulation - autonomous research:
Optimal Planning Systems (NASCar-OPS)
|
P.F.J. Lermusiaux, P.J. Haley, Jr., C. Mirabito, C. Kulkarni, D. Subramani, S. Jana Massachusetts Institute of Technology
|
Project Summary Real-time Sea Exercises Ongoing MIT-MSEAS Research NASCar-OPS-supported publications Additional NASCar-OPS Links Background Information References
|
|
|
| This research is sponsored by the Office of Naval Research. | |||
Project Summary
Today, the number of autonomous platforms used in semi-coordinated sea operations can be larger than 10 and this number is increasing. This new paradigm in ocean science and operations calls for investigations as those envisioned by the Northern Arabian Sea Circulation – autonomous research (NASCar) initiative. The need for clever autonomous observing and prediction systems is especially acute in the NASCar region due to the frequent pirate activities and the relative paucity of in situ observations.
Background information is available below.
| Top of page |
Real-time Sea Exercises
|
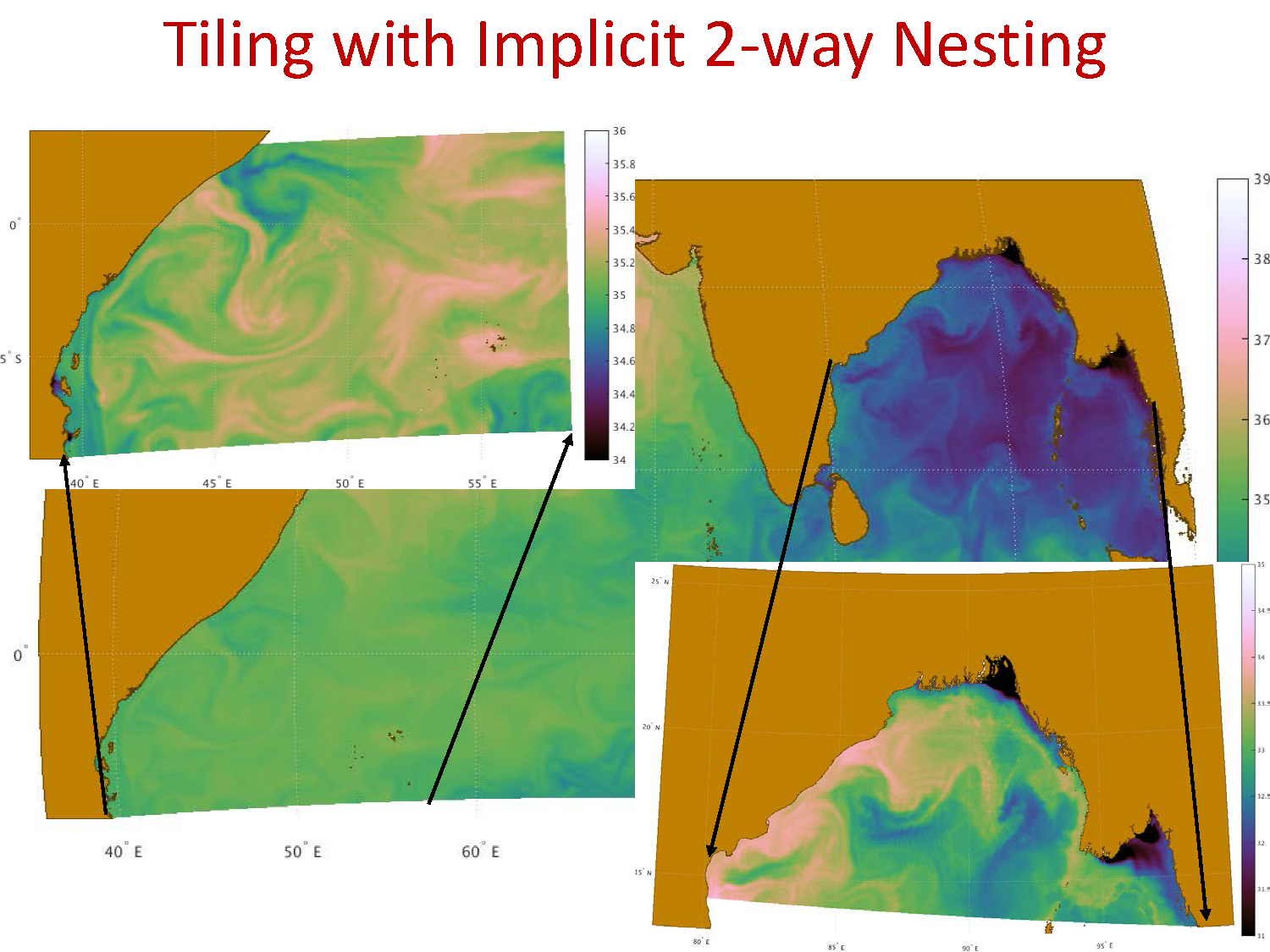
NASCar-OPS Sea Exercise 2017. The real-time exercise occurs in the Arabian Sea during February-March 2017. In collaboration with the NASCar team, we utilize our multi-resolution MSEAS PE modeling system to: (i) forecast the regional high-resolution ocean fields and their probability; (ii) utilize these fields to forecast the reachability sets and fronts of underwater vehicles; (iii) forecast the uncertainty of such reachability fields and optimal paths. Real-time modeling products and data sources can be found on the Sea Exercises page. |
|
| Top of page |
Ongoing MIT-MSEAS Research
Long-Term Goals:
- Apply our theory and schemes for rigorous optimal path planning and persistent ocean sampling with swarms of autonomous vehicles, and
- Further quantify the dynamics and variability of the circulation features and mixed layer, and the responses to monsoon winds, utilizing multi-resolution data-assimilative ocean modeling and process studies.
Objectives:
- Utilize and further develop our optimal planning schemes (time, energy, swarm or Lagrangian Coherent Structures optimal paths) for ocean vehicles (gliders, drifters, floats, wave-gliders)
- Provide guidance for persistent optimal sampling, including for long-duration observation system design and for adaptive sampling during sea operations, using advanced Bayesian information theoretic approaches
- Improve the understanding of the variability and interactions of the regional wind-driven and buoyancy-driven circulation features and mixed-layer dynamics, using dynamical analyses and process-oriented scientific modeling
- Provide multiscale data-assimilative ocean field estimates using multi-resolution numerical ocean modeling, both for real-time sea operations and for optimized re-analyses
- Collaborate with DRI colleagues and NRL, transferring data, expertise, approaches, algorithms and software. Utilize and leverage the MIT Naval Officer education program.
Presentations and Meetings
NASCar-OPS-supported Publications
| Top of page |
Additional NASCar-OPS Links
Links from ONR Arabian Sea (NASCar) Interior Working Group
| Top of page |
Background Information
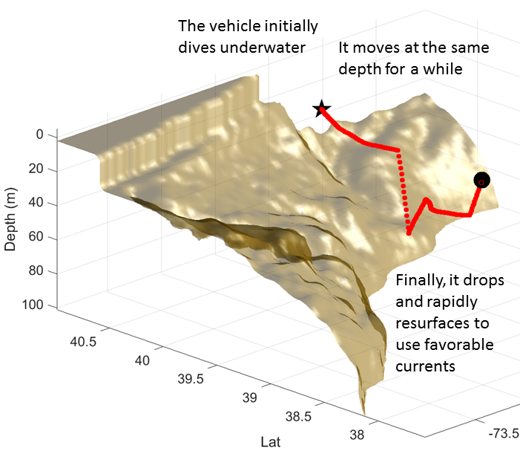
One of our motivations is to apply the theory and schemes we derived for optimal path planning of swarms of ocean vehicles operating for long-duration in strong and dynamic currents (Lolla et al, 2012a, b; Lolla et al, 2014a,b; Lermusiaux et al., 2015; Lolla and Lermusiaux, 2015). For any given ocean currents (however strong), our level-set equations provide the exact time-optimal paths to travel from one location to another. The methodology has been extended to energy-optimal (Subramani et al., 2015) and swarm-optimal (Lolla et al., 2015) paths. It can also account for uncertainty (Lermusiaux et al., 2015), predicting the probability density functions of optimal path fields. Finally, we plan to provide guidance for the optimal sampling of the region (e.g. Lermusiaux, 2007). This includes Observation System Simulation Experiments (OSSEs).
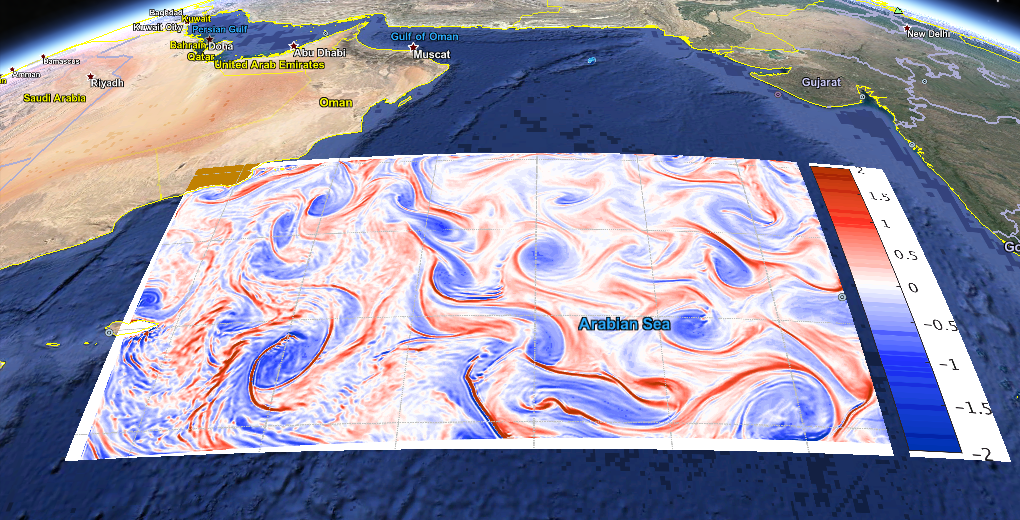
The other motivation is to further the understanding of the dynamics in the region, focusing on the variability in time and space of the circulation features and of the mixed-layer, and on the responses of this dynamics to forcing by monsoon winds. Our interests include the dynamics of the wind-driven and buoyancy-driven currents and eddies, especially in relation to the mixed-layer physics and the western boundary currents. These features need to be further described and characterized, and their interactions need to be better understood and quantified. The NASCar DRI is well positioned to make major contributions to this understanding. Both our optimal path planning and quantitative dynamics research activities will be enabled by our multi-resolution ocean modeling of the region. Process-based modeling is also critical and will be utilized.
Our research questions relate to:
- The discovery of optimal paths (e.g., what are the properties of time-optimal, energy-optimal, swarm-optimal, or LCS-optimal paths in the region?),
- Persistent optimal sampling (e.g., how many gliders, drifters, floats, surface crafts and/or wave-gliders are needed to characterize the mesoscale dynamics of the Northern Arabian Sea or its sub-regions?),
- Multiscale regional dynamics and process modeling (e.g., what are key dynamics and exchanges occurring in the region among the mixed-layer dynamics, boundary currents and/or subsurface circulation features), and
- Multi-resolution modeling and data assimilation (e.g., what is the optimal way to utilize the Lagrangian information content of the drifter/float observations?).
Specific Research Tasks
Optimal Path Planning of Swarms of Autonomous Vehicles for Persistent Sampling
- Apply our theory and schemes for rigorous optimal path planning and persistent ocean sampling with swarms of autonomous vehicles in the NASCar ocean region, utilizing inputs from our multi-resolution data-assimilative ocean modeling.
- Employ and further develop our rigorous planning schemes for reachability studies and for specific optimality objectives (e.g. time, energy, swarm-formation, Lagrangian Coherent Structures or uncertainty optimal paths), to be selected in accord with the needs of the DRI. Our predicted optimal headings and relative operating speeds will be provided to the operational fleets of instruments and vehicles (e.g. gliders, drifters, floats or wave-gliders).
- Use models specific to vehicle types (floats, wave-gliders, etc.).
- Further parallelize and optimize our codes for planning, OSSEs, and adaptive sampling using distributed computing.
- Complete numerical algorithms and efficient implementations of these codes for 3D in space and time-varying realistic ocean flows.
- Provide guidance for persistent optimal sampling. This can include data-driven modeling guidance for the design of optimal long-duration observation systems and for adaptive sampling, using advanced Bayesian information theoretic approaches.
Quantitative Dynamics Analyses using Process-oriented and Multi-resolution Modeling
- In collaborations with the DRI team, further quantify the dynamics and variability of the circulation features and mixed layer, and the responses to monsoon winds.
- Set-up and apply our MSEAS systems (MSEAS, 2009; Haley and Lermusiaux, 2010, 2015) for process-based modeling studies and dynamics analyses, and for multi-resolution data-driven modeling of tidal-to-mesoscale processes.
- Contribute to the description and quantification of the variability of circulation features, transports, and mixed-layer properties, as well as of the effects of atmospheric forcing and of internal tides and long internal waves (if sufficiently resolved by observations).
- Participate to field campaigns, providing ocean forecasts, dynamics descriptions and sampling guidance.
- Complete multiscale ocean re-analyses (using improved data processing, parameters, resolution, boundary and initial conditions), to be used for dynamics analyses. This will allow us to map the time and space variability and to utilize term-by-term, flux balances, and Lagrangian analyses as needed.
- Transfer data, approaches, and algorithms to the DRI team and naval laboratories.
| Top of page |
References
- Haley, P.J., Jr. and P.F.J. Lermusiaux, 2010. Multiscale two-way embedding schemes for free-surface primitive-equations in the Multidisciplinary Simulation, Estimation and Assimilation System. Ocean Dynamics, 60, 1497-1537. doi:10.1007/s10236-010-0349-4.
- Haley, P.J., Jr., A. Agarwal, P.F.J. Lermusiaux, 2015. Optimizing Velocities and Transports for Complex Coastal Regions and Archipelagos. Ocean Modeling, 89, 1-28. doi:10.1016/j.ocemod.2015.02.005
- Lermusiaux, P.F.J, 2007. Adaptive Modeling, Adaptive Data Assimilation and Adaptive Sampling. Refereed invited manuscript. Special issue on "Mathematical Issues and Challenges in Data Assimilation for Geophysical Systems: Interdisciplinary Perspectives". C.K.R.T. Jones and K. Ide, Eds. Physica D, Vol 230, 172-196, doi: 10.1016/j.physd.2007.02.014.
- Lermusiaux P.F.J, T. Lolla, P.J. Haley. Jr., K. Yigit, M.P. Ueckermann, T. Sondergaard and W.G. Leslie, 2015. Science of Autonomy: Time-Optimal Path Planning and Adaptive Sampling for Swarms of Ocean Vehicles. Chapter 11, Springer Handbook of Ocean Engineering: Autonomous Ocean Vehicles, Subsystems and Control, Tom Curtin (Ed.). In press.
- Lolla, T.; Ueckermann, M.P.; Yigit, K.; Haley, P.J.; Lermusiaux, P.F.J., 2012a, Path planning in time dependent flow fields using level set methods, 2012 IEEE International Conference on Robotics and Automation (ICRA), 166-173, 14-18 May 2012, doi: 10.1109/ICRA.2012.6225364.
- Lolla, T., Lermusiaux, P. F. J., Ueckermann M. P. and P. J. Haley Jr., 2012b. Modified level set approaches for the planning of time-optimal paths for swarms of ocean vehicles, MSEAS report-15. Tech. rep., Department of Mechanical Engineering, Massachusetts Institute of Technology, Cambridge, MA USA.
- Lolla, T., P.F.J. Lermusiaux, M.P. Ueckermann and P.J. Haley, Jr., 2014a. Time-Optimal Path Planning in Dynamic Flows using Level Set Equations: Theory and Schemes. Ocean Dynamics, 64, 10:13731397. DOI: 10.1007/s10236-014-0757-y.
- Lolla, T., P.J. Haley, Jr. and P.F.J. Lermusiaux, 2014b. Time-Optimal Path Planning in Dynamic Flows using Level Set Equations: Realistic Applications. Ocean Dynamics, 64, 10:13991417. DOI: 10.1007/s10236-014-0760-3.
- Lolla, T., P.J. Haley. Jr. and P.F.J. Lermusiaux, 2015. Path Planning in Multi-scale Ocean Flows: Coordination and Dynamic Obstacles. Ocean Modelling, sub-judice.
- Lolla, T. and P.F.J. Lermusiaux, 2015. A Forward Reachability Equation for Minimum-Time Path Planning in Strong Dynamic Flows. SIAM Journal on Control and Optimization, sub-judice.
- Subramani, D.N., T. Lolla, P.J. Haley and P.F.J Lermusiaux, 2015. A Stochastic Optimization Method for Energy-based Path Planning, In: Dynamic Data-driven Environmental Systems Science Conference (Eds. Ravela, Sandu et al), Springer Lecture Notes In Computer Science, In Press. Final Publication will be available at http://link.springer.com/
| Top of page |